SLAM in gazebo [closed]

I am trying to obtain SLAM maps using gazebo, I followed this tutorial.
Using the command,
roslaunch erratic_navigation_apps demo_2dnav_slam.launch
and
rosrun erratic_teleop erratic_keyboard_teleop
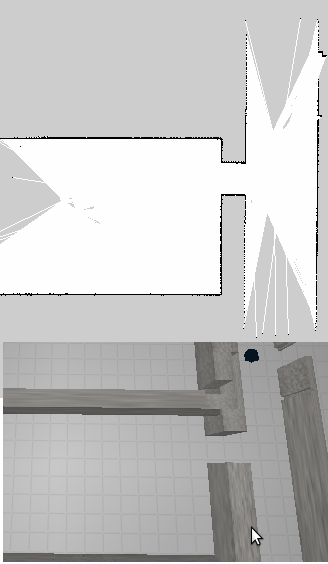
The teleoperation works nicely (using WASD keys), though somewhat slowly. However, I am not able to obtain any maps. I have previously used stage with gmapping & mapserver to obtain SLAM (as a pgm image file), however gazebo seems rather different.
Also, hoping that this method for the SLAM map starts to work - can this method, specifically meant for the erratic robot be used for other robots ?
Any help is most appreciated.

UPDATE: Solved it ! scroll down for my answer
Closed for the following reason
the question is answered, right answer was accepted by
Arkapravo
close date 2013-06-01 19:49:57
add a comment