URDF for a sphere

I am learning URDF, when I tried making a sphere;
<?xml version="1.0"?>
<robot name="myfirst">
<link name="base_link">
<visual>
<geometry>
<sphere radius="1.0"/>
</geometry>
<material name="green">
<color rgba="0 1 0 1"/>
</material>
</visual>
</link>
</robot>
All I get is something more like a polyhedra;
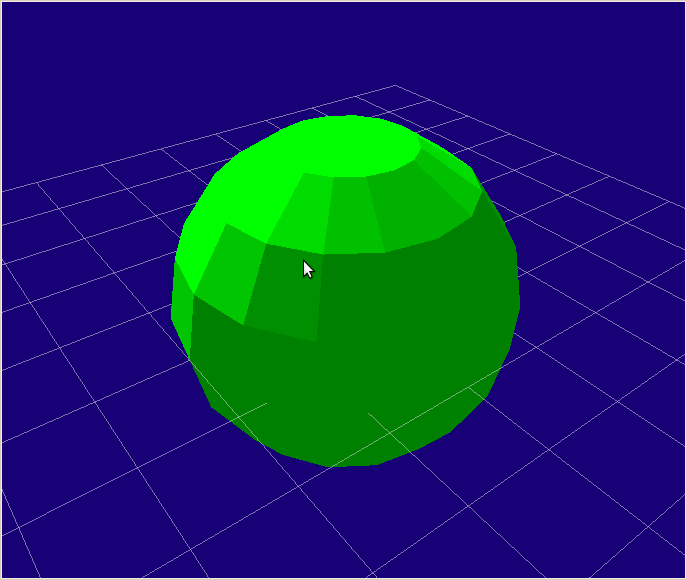
Is there any way to get a better sphere ?
add a comment