
How to process geometry messages of type PoseWithCovarianceStamped and PoseStampe
Hi, I am using ROS fuerte version on Ubuntu 10.04.
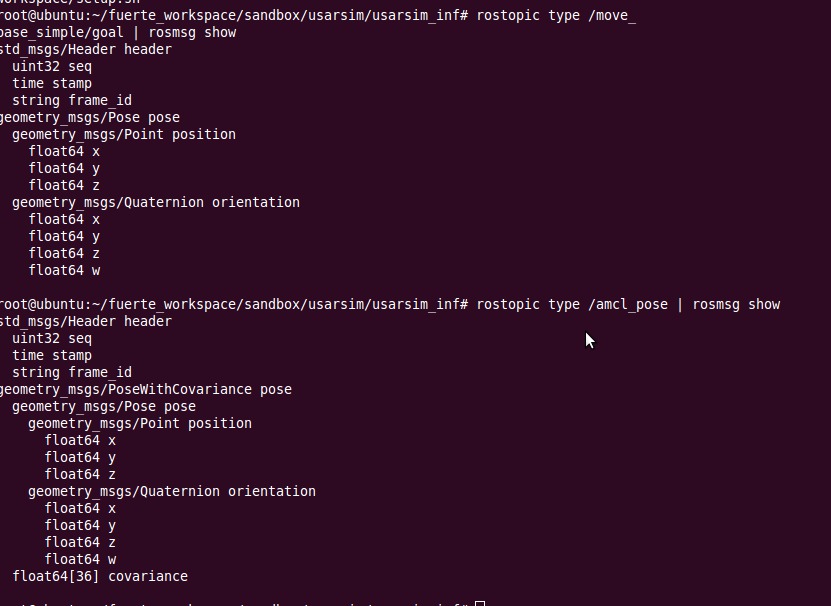
I have a screen shot below (WHOLE TOPIC.jpg) which tells about what type of messages are published on topics amcl_pose and move_base_simple/goal :
Messages of amcl_pose are passed to a callback function,called currentPosCallback
void CmdVelMux::currentPosCallback(const geometry_msgs::PoseWithCovarianceStamped::ConstPtr& msg)
{
double xPos;
double yPos;
double zPos;
xPos = msg->pose.pose.position.x;
ROS_INFO("the position value is %lf \n ",xPos);
}
Messages of move_base_simple/goal are passed to a callback function,called goalPosCallback
void CmdVelMux::goalPosCallback(const geometry_msgs::PoseStamped::ConstPtr& msg)
{
double x;
double y;
double z;
x = msg->pose.position.x;
y = msg->pose.position.y;
z = msg->pose.position.z;
ROS_INFO("the position value is %lf \n ",x);
}
Question 1:I want to calculate angle between current goal(from move_base_simple/goal topic) and robot position (amcl_pose).
In trigonometry, we can calculate angle between two points P1(x1,y1) and P2(x2,y2). Is there any way to do this type of thing here?
I want to store this angle in class member data, what is the guarantee that it is the most updated one?
How to do that?
Thanks for any kind of help................


{kind=link}