
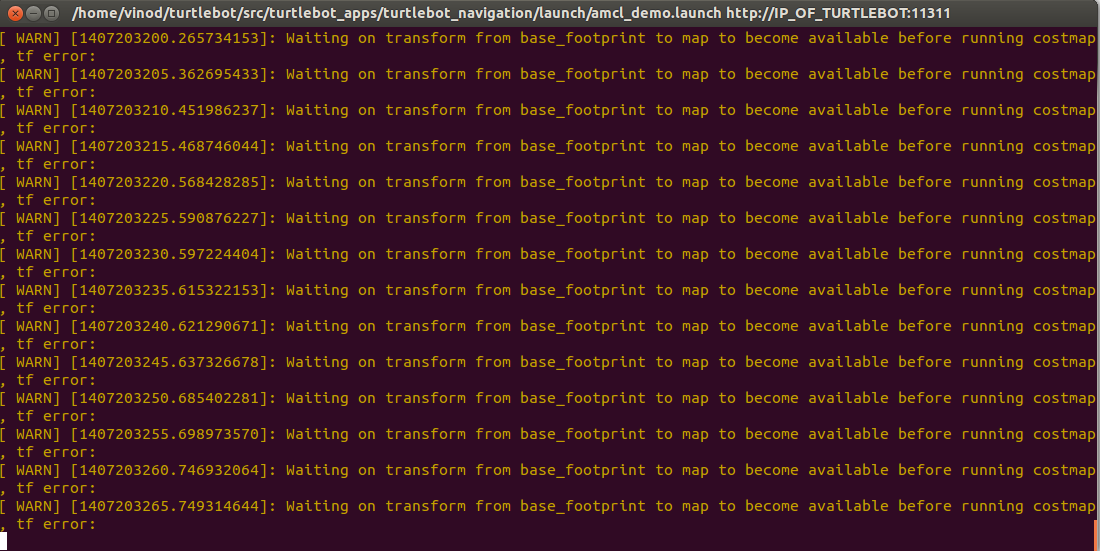
Waiting on transform from base_footprint to map to become available
Hello There!
I am having a hard time to get the Navigation Stack running on a robot (Turtlebot).
I am Using AMCL for Autonomous Navigation in the View of Rviz.
when i Launch
roslaunch turtlebot_navigation amcl_demo.launch map_file:=/home/sr1/Blk-S-Level-1.yaml
I get a warning
when i launch Rviz, roslaunch turtlebot_rviz_launchers view_navigation.launch
i dont see anything only black Background. under Global Setting i see Error, No tf.
sorry, haven't got karma>20, so cannot post images
Please, can someone help me out? If anything else is needed, I will gladly post it later.
Thanks in advance :)

Now you have enough karma In Gloabl setting try to put /map