
ekf_localization_node strange divergence
I experienced some behavior of the ekf_localization_node that I cannot explain.
To demenstrate this case, I use an ekf_localization_node with only one odometry input. The configuration is very simple:
frequency: 20
sensor_timeout: 0.5
two_d_mode: true
map_frame: map
world_frame: odom
odom_frame: odom
base_link_frame: base_footprint
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
odom0_differential: true
And the result looks like this (Red: wheel odometry, Orange: ekf odometetry)
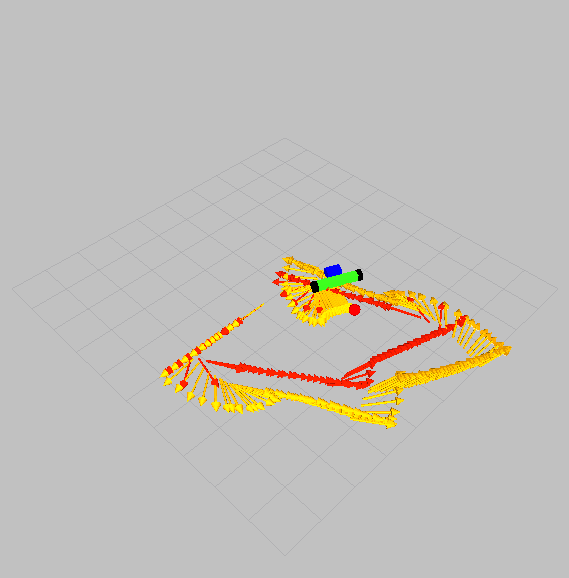
I supposed to get idendentical tracks. What's wrong?
add a comment

