
LaserProjector's results differ from rviz

Hello ROS geeks, I face a difficulty in projecting a LaserScan.
We have a rotating SICK LMS scanner which publishes laser scans relative to tf frame /laser.
Then I use LaserProjector::transformLaserScanToPointCloud to project the scan into a point cloud relative again to the /laser frame.
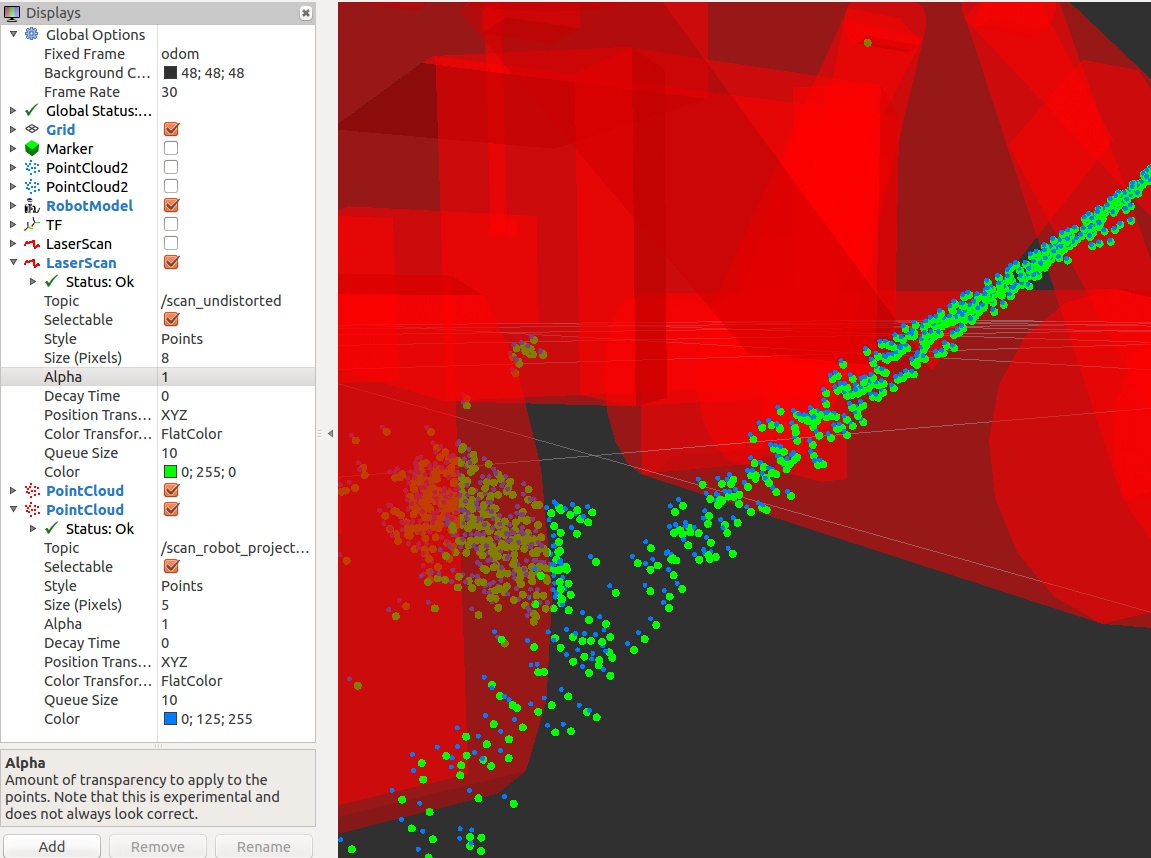
But when I display both the scan and the pointcloud in rviz, they differ slightly. That seem pretty odd to me, because I've seen LaserProjector being used also in rviz' laser_scan_display plugin in a very similar way (the only difference is rviz computes the pointcloud relative to the fixed frame, which is in my case /odom).
Do you have some ideas why do the two displayed things differ? Or do you have an idea on how to debug this?
Thanks for any ideas.
add a comment
