kinect frame
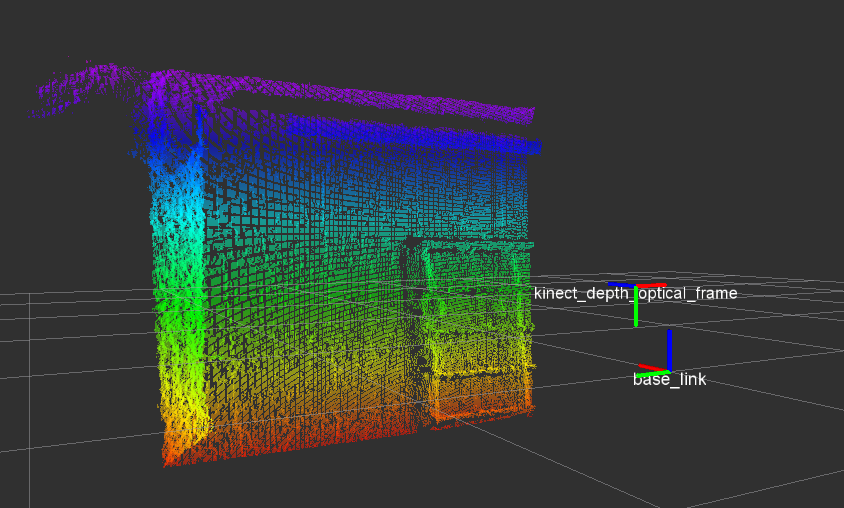
i use openni_launch and display camera/depth/points on rviz. when i select fixed frame as /camera_optical_depth_frame, the cloud is upside down and the rviz axes with z up. I know this is conventional axis of rviz. Also when i save this cloud to pcd file, its orientation is still the same as in rviz.
How can i transform cloud into normal orientation with z forward?
Also, I dont understand fixed frame purpose and tf transform clearly? How can i know which is world frame and camera frame?
add a comment