Realsense R200 with rtabmap rgbd odometry
Hello,
I'm working with the intel realsense R200 camera with the objective of getting visual odometry. For this, I'm using the realsense ROS SDK from Intel along the rtabmap_ros rgbd_odometry node.
I've verified that the color and depth camera data are coming out correctly through rviz but most of the time, when I start rgbd_odometry, I get one of these errors and do not get an odometry stream:
[ WARN] (2015-10-10 14:15:11.873) OdometryBOW.cpp:317::computeTransform() Local map too small!? (15 < 20)
[ WARN] (2015-10-11 00:05:41.095) OdometryBOW.cpp:304::computeTransform() Not enough correspondences (0 < 20)
[ WARN] (2015-10-11 00:05:41.233) OdometryBOW.cpp:308::computeTransform() Not enough inliers (9 < 20)
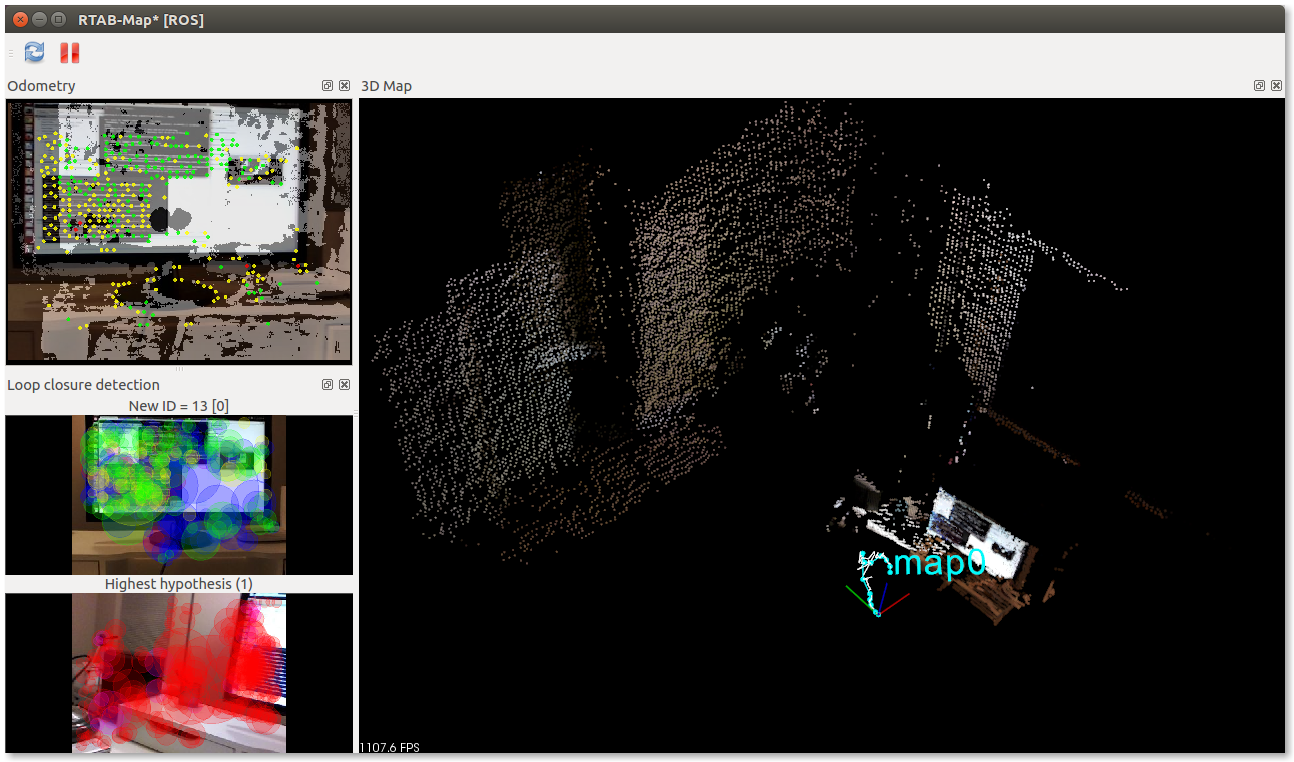
Sometimes, odometry works fine when I start the rgbd_odometry node, but as I move the camera, the warnings eventually show up. At first I thought this was specific to when the camera is facing far off targets(>2m) but it seems to happen even when the camera is facing something close by(<1m). My guess is that it is not able to identify enough features in the frame but wondering if it could be something else since I think there are a lot of features in my test area (it's not yet on a mobile robot). Can anyone shed light on what these warnings mean? I'm new to ROS so could also be missing something.
Image size is 320x240 at 30 frames per sec. Set up is Ubuntu 14.04 with ROS_Indigo. Running on 4th gen i5 and no external GPU.