
Local and global costmap issues

Hi, I got an issue with the configuration of the local and global costmaps. I end up with this situation:
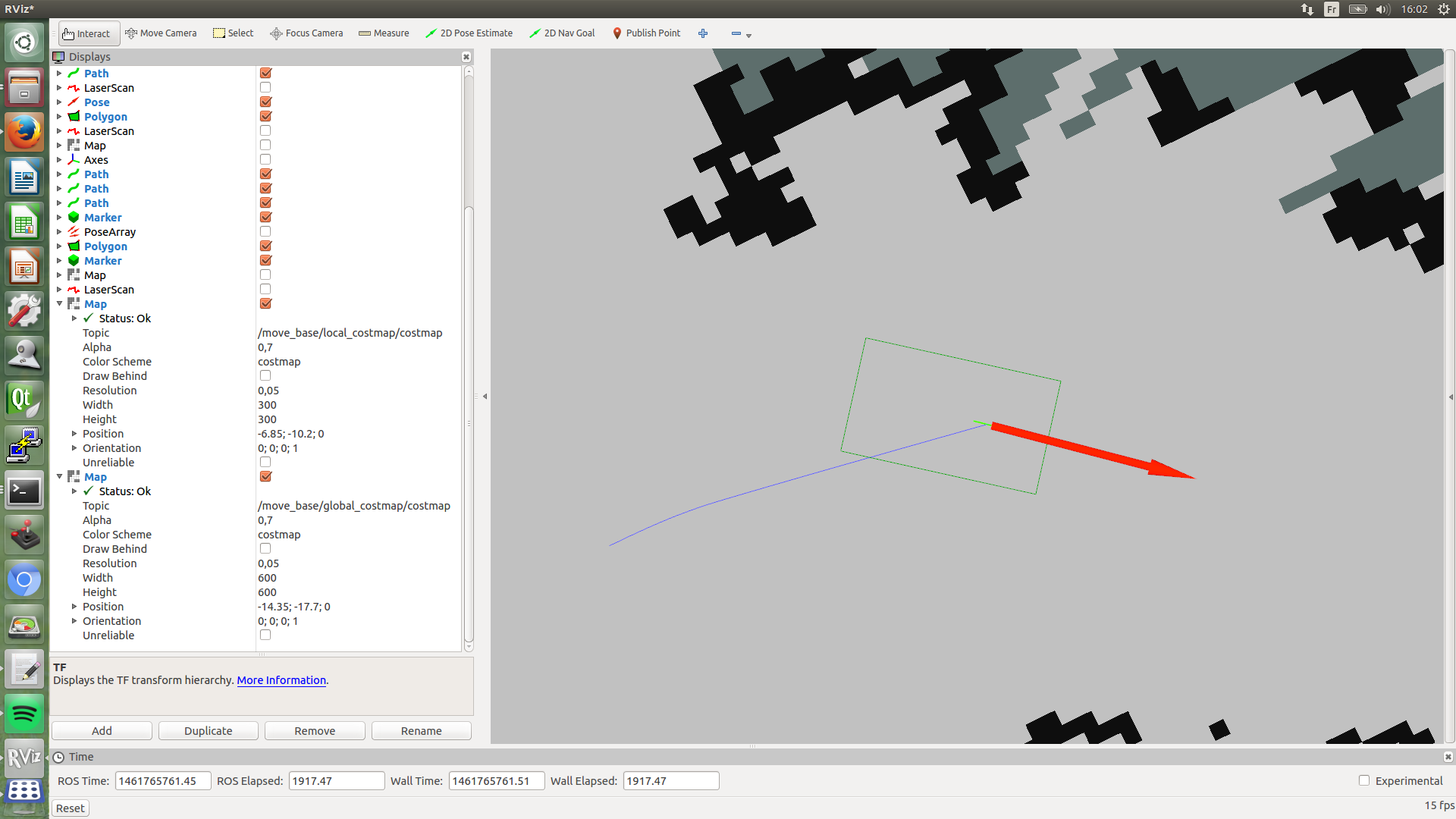
For RVIZ, there is no trouble with my costmaps.
Here are my config files:
local_costmap:
local_costmap:
update_frequency: 3.0
publish_frequency: 3.0
static_map: false
rolling_window: true
width: 15
height: 15
resolution: 0.05
origin_x: 0.0
origin_y: 0.0
global_costmap:
global_costmap:
update_frequency: 2.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 40.0
height: 40.0
resolution: 0.05
Common_costmap:
footprint: [[-0.792, -0.344], [0.408, -0.344], [0.408, 0.344], [-0.792,0.344]]
observation_sources: scan scan2
scan: {sensor_frame: /laser, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
scan2: {sensor_frame: /laser2, data_type: LaserScan, topic: /scan2, marking: true, clearing: true}
I end in this situation because I notice my global plan didn't take in count the global costmap based on the map.

what situation? it is not clear what is your problem.
It's the same situation that this one I use 2 laserscans : one higher than the others. I have correct the situation, I will post my config files.