Having problems with velodyne VLP-16 and ros
Hi, I'm new to ROS and Linux so my question may be very stupid. Sorry for that.
I want to connect VLP-16 and laptop (in fact i need to connect it with raspberry pi, but i first wanna try it on laptop). I tryed to use tutorial "Getting Started with the Velodyne HDL-32E". I wasn't surprise that I fail with it. So I tryed to solve problems in different ways but i didn't succeed. So i decide to write post here.
Maybe i should solve problems step by step.
So. Could someone explain how should I work with velodyne driver and VLP-16 and how can I find out my VPL-16 ip on Ubuntu?
I use Ubuntu 12 and ros "fuerte". On raspberry I would use "indigo" instead.
Thanks and sorry for my bad english.
Hi again. Ty for your help. Now i build velodyne_driver from source but I still don't scceed.
First in tutorial "Getting Started with the Velodyne HDL-32E" I need to do that steps:
Power the LIDAR via the included adapter Connect the LIDAR to an Ethernet port on your computer. Statically assign an IP to this port in the 192.168.3.x range.
sudo ifconfig eth0 192.168.3.100Add a static route to the LIDAR's IP address. The IP address can be found on the CD case which was included with the LIDAR.
sudo route add 192.168.XX.YY eth0
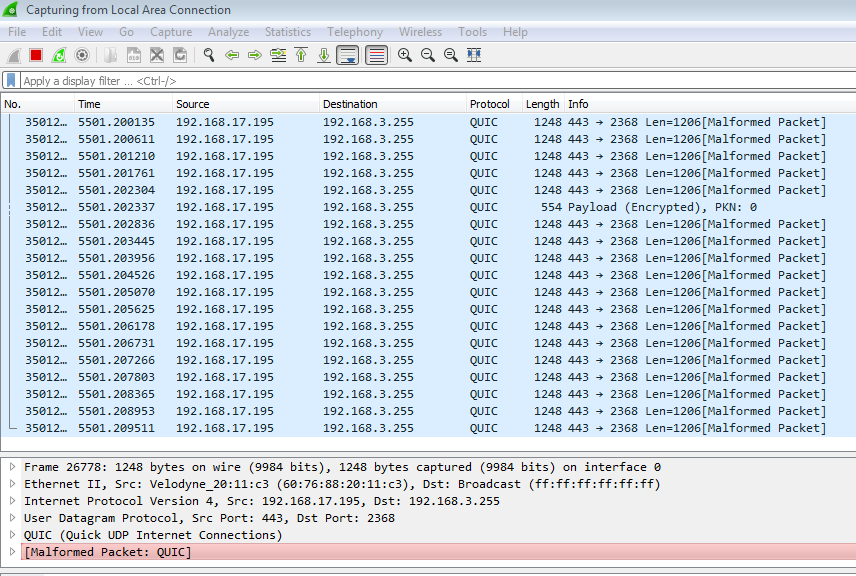
How could I find what XX and YY should be? I don't have any CD included.
And after that. How could I know are my ip settings set correctly (look any data on my laptop recived by VLP-16)?
Thanks.