
robot_localization: how to define f function
Hi to all,
I'm using and studying the robot_localization package in order to integrate it with my system. At the moment, I would like to better understand how it works and so I've read the Thomas Moore's article and I also watched the video presentation.
Unfortunately, I can't understand how the function f is described in the following relation:
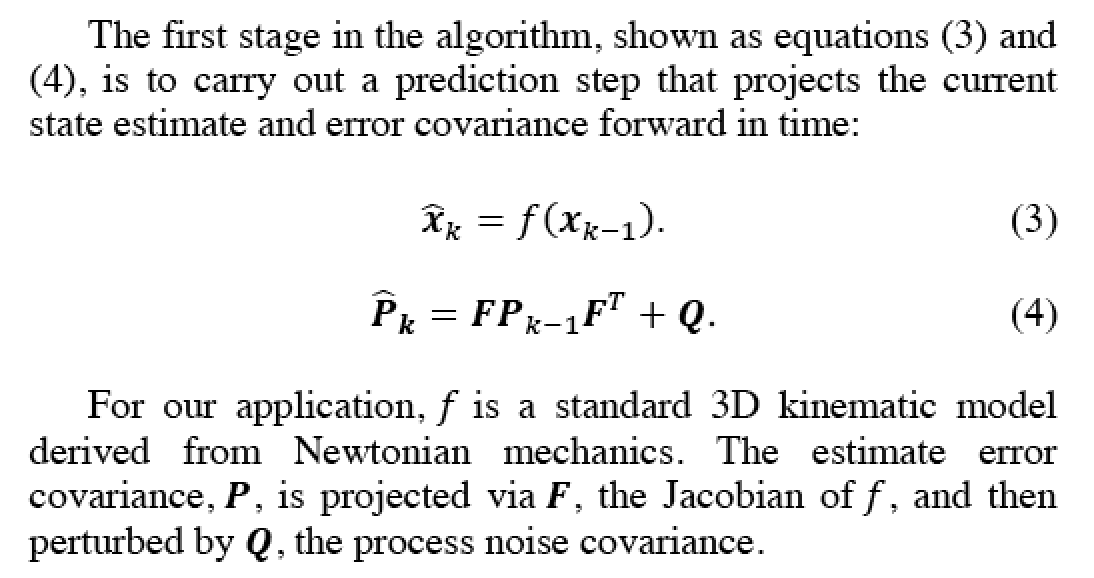
How it is possible to mathematically define the function f and Q?
Can you help me in understanding this, please? I know it's maths and that it is not related to ROS, but I think that it is very important to understand these functions for me.
Thank you!


I've read this topic, but I would like to have an example on how to write the full f function, if possible.
May be, I've found the state transition matrix described in this way. But I can only see 9 components for the vector and not 12 as specified in the article. Why?
An EKF is estimating the state of something. It's up to the author to determine which variables to estimate. The link you provided is just estimating a different set of variables. Specifically, it appears to lack orientation and angular velocity.