
how to deal with imu_drift when robot is stationary ?

Hello,
- I'm using one imu and my odom to feed
robot_pose_ekfto get a more accurate tf (from odom to base),and then let amcl use this tf.But I found that when robot is stationary ,the imu output orientation data is drafting over time. When robot is moving, the estimated pose from amcl is pretty good. My imu is mpu6050,it can output rotation,angular_velocity and linear accleration .This is imu drift picture when robot is stationary for about 30 minutes. The red line is imu_yaw get from mpu6050 topic.
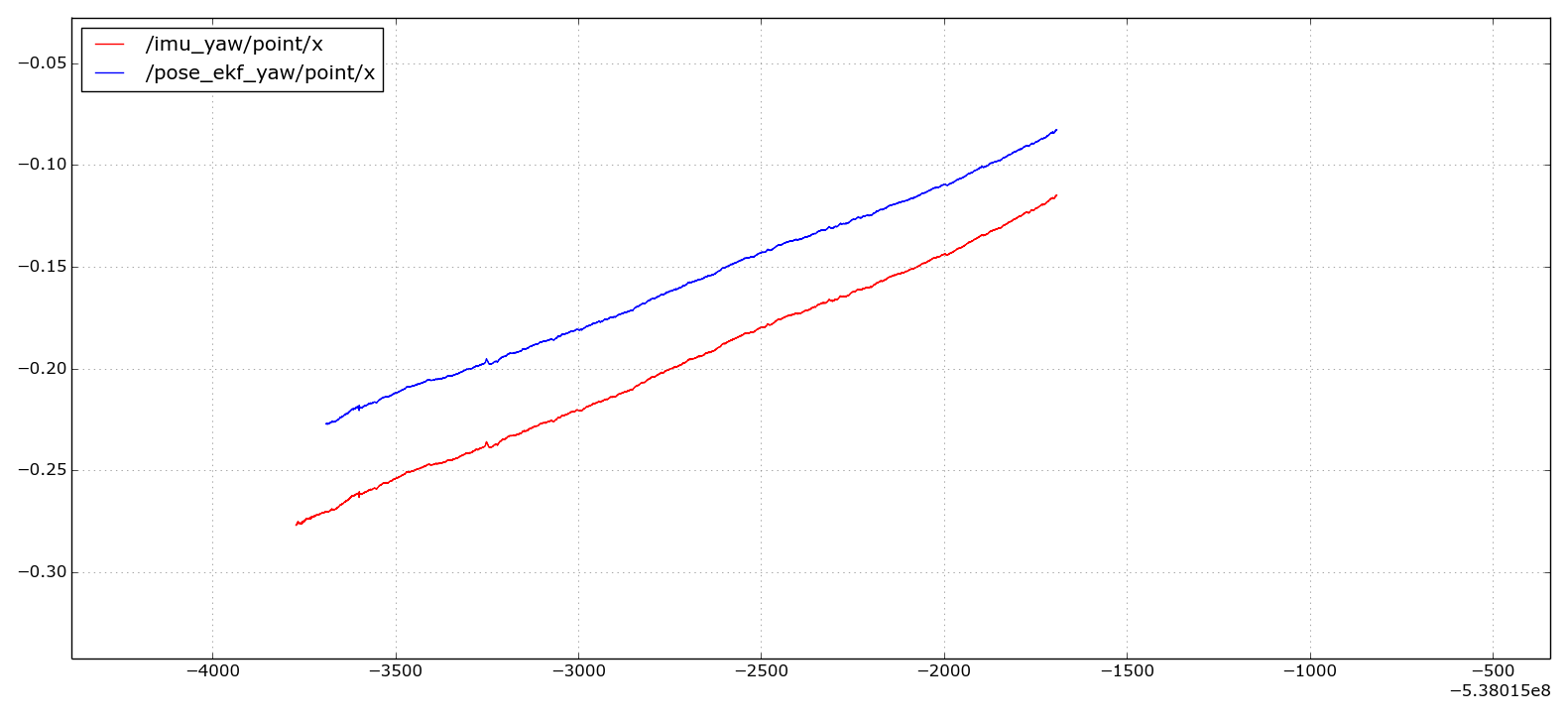 .
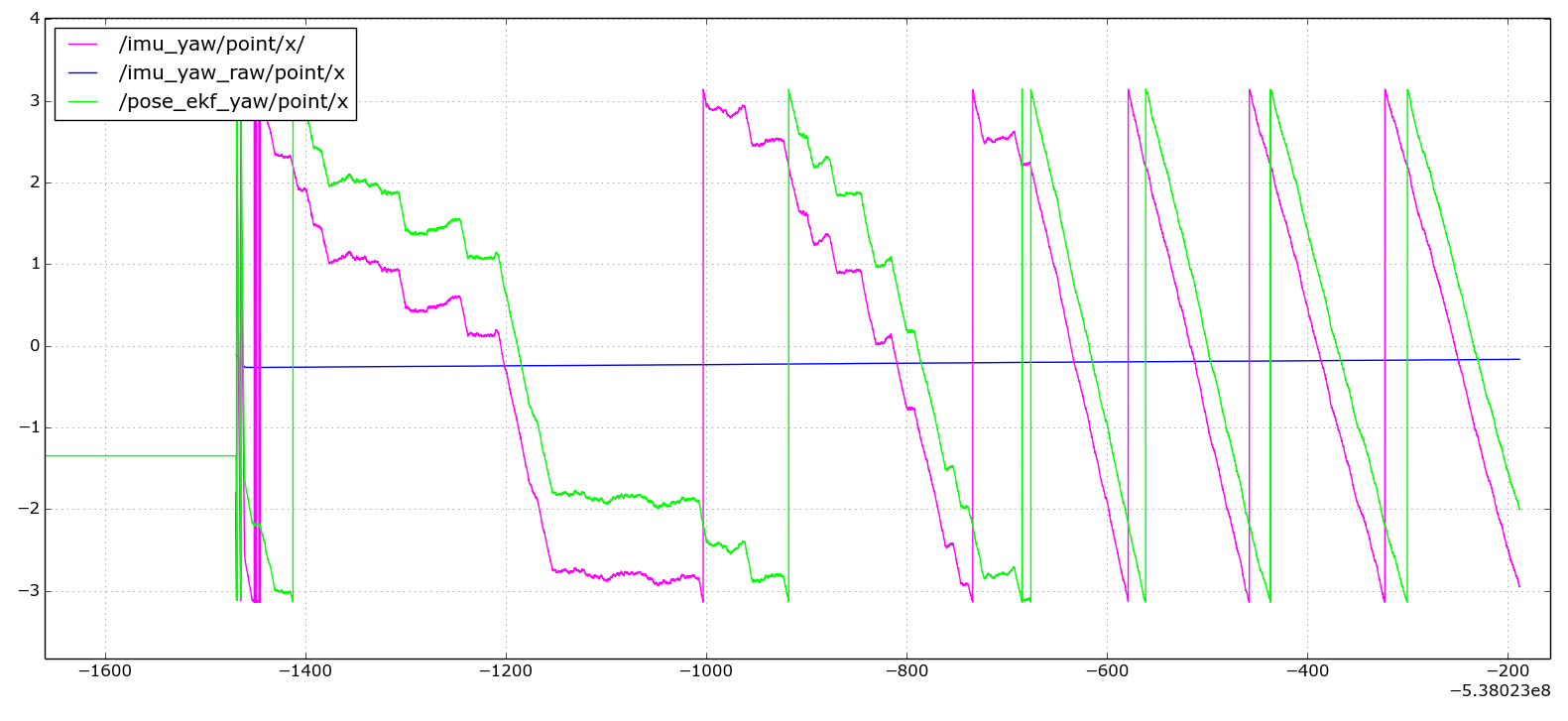
. - when i use imu_filter_madgwick,make
robot_pose_ekfto use the filtered imu_data,this is the result.The pink line got fromimu_filter_node:/imu_data topic,the purple line got frommpu6050 topic:/imu_data_raw. It is werid the raw yaw data(purple line) from mpu6050 doesn't drift and the filtered yaw data(pink line)is drifting,Why??? 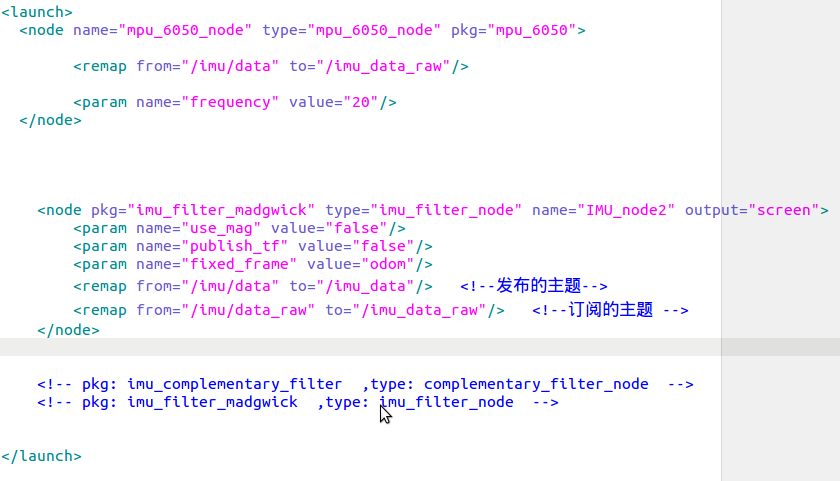
- Does imu_filter_madgwick package can improve robot_pose_ekf's output , when robot is stationary?? Or
robot_localizationcan help this ?? How to get a accurate yaw estimate when robot is stationary? - Thanks in advance!!!! If i describe my question not clearly,please let me know .

have you figured this out?