
[with bag file] Use GPS with robot_localization and navsat_transform_node [closed]
Hi to all, hi @Tom Moore,
my configuration includes Novatel RTK GPS, Razor IMU and Husky with wheel encoders. I would like to implement a GPS waypoint navigation in ROS by using robot_localization and navsat_transform_node as discussed in this previous topic.
My Razor IMU with ROS driver report non-zero values when facing EAST, so I added the yaw_offset to make the IMU work accordingly with navsat_transform_node.
My imu topic is: /imu
My GPS topic is: /fix
I tried to modify my control.launch file in order to add the navsat_transform_node, but I don't know if it is correct.
I do not know if I correctly handled the two robot_localization nodes in the control.launch file.
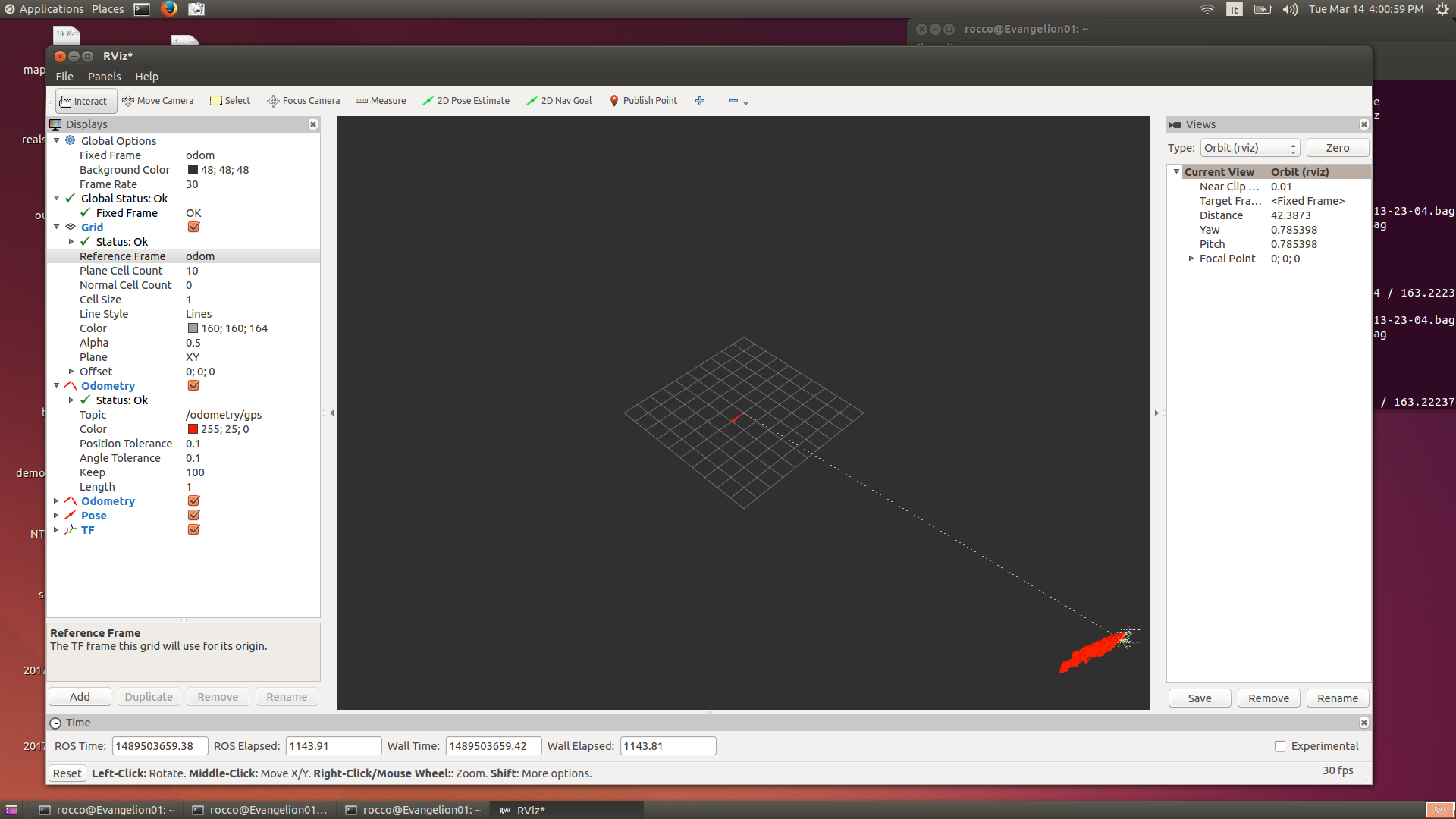
If I tried to playback my recorded bag file in RVIZ, I receive this error:
Fixed Frame [map] does not exist
No transform from [base_footprint] to frame [map]
If I change the fixed_frame to odom, I see my robot jumping randomly in RVIZ without any reason.
If I set fixed_frame to map, I get this error:
[ERROR] [1489506379.984277505, 45.920000000]: Could not obtain transform from odom->base_link
May be I did some mistake with the frames, can you please give me some suggestions on how to solve this problem? Do you have the possibility to run my bag file?
If I change the world_frame in test.yaml file, I get an error when I launch the Husky control.launch file.
Can you please give me any suggestions, please?
EDIT1: I added the magnetic declination for the GPS.
My control.launch file:
<?xml version="1.0"?>
<launch>
<rosparam command="load" file="$(find husky_control)/config/control.yaml" />
<node name="base_controller_spawner" pkg="controller_manager" type="spawner" args="husky_joint_publisher husky_velocity_controller --shutdown-timeout 3"/>
<node pkg="robot_localization" type="navsat_transform_node" name="navsat_transform_node" respawn="true">
<param name="magnetic_declination_radians" value="0.0640"/>
<param name="yaw_offset" value="1.5707963"/>
<remap from="/imu/data" to="/imu" />
<remap from="/gps/fix" to="/fix" />
<remap from="/odometry/filtered" to="/odometry/filtered" />
</node>
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization">
<rosparam command="load" file="$(find husky_control)/config/test.yaml" />
<param name="two_d_mode" value="false"/>
</node>
<node pkg="interactive_marker_twist_server" type="marker_server" name="twist_marker_server" output="screen"/>
<node pkg="twist_mux" type="twist_mux" name="twist_mux">
<rosparam command="load" file="$(find husky_control)/config/twist_mux.yaml" />
<remap from="cmd_vel_out" to="husky_velocity_controller/cmd_vel"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_realsense"
args="-0.3 0 1.1 1.5 3.14 1.5 /front_bumper_link /realsense_frame 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_laser"
args="-0.3 0 0.6 0 0 0 /front_bumper_link /laser 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_color"
args="0 0 0 0 0 0 /realsense_frame /camera_color_optical_frame 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_depth"
args="0 0 0 0 0 0 /realsense_frame /camera_depth_optical_frame 100" />
<!-- <node pkg="tf" type="static_transform_publisher" name="base_to_imu"
args="0 0 0 0 0 0 /imu_link /base_imu 100" /> -->
<node pkg="tf" type="static_transform_publisher" name="base_to_gps"
args="-0.3 0 0.9 0 0 0 /front_bumper_link /gps 100" />
<node pkg="tf" type="static_transform_publisher" name="base_to_imu"
args="0 ...
I tried to run the code, but I get strange behaviors in RVIZ. When I load the imu values into RVIZ, the robot frame disappears. May be I mounted the IMU in the wrong way? Now, the IMU x-axis faces the front bumper of the robot. Is it correct?
I edited my first message in order to add the reference for each frame and the magnetic declination. Can you tell me if it is correct please?
I added the RVIZ screenshot and a recorded bag file with
/fixand/imutopics in addition to the Husky topics.Hi, can you solve the problem?. I'm newbie in ROS, and now I'm triying to configure the navsat_transform_node and ekf_localization_node for an UM7 orientation sensor and an Adafruit Ultimate GPS Breakout. I based my configuration in your examples but I have some problems with the tf/ and frames_id
You may add an image of rqt_graph of your system ?
My code is not working, I didn't solved my problem, so you should not use it! I'm sorry! I'm waiting for a solution..
Thanks Marcus for your fast response
Try to follow this other topic: http://answers.ros.org/question/25754... I hope someone will answer so we can solve our problem!