
How can we estimate the likelihood field for a particular scan in probabilistic terms ?
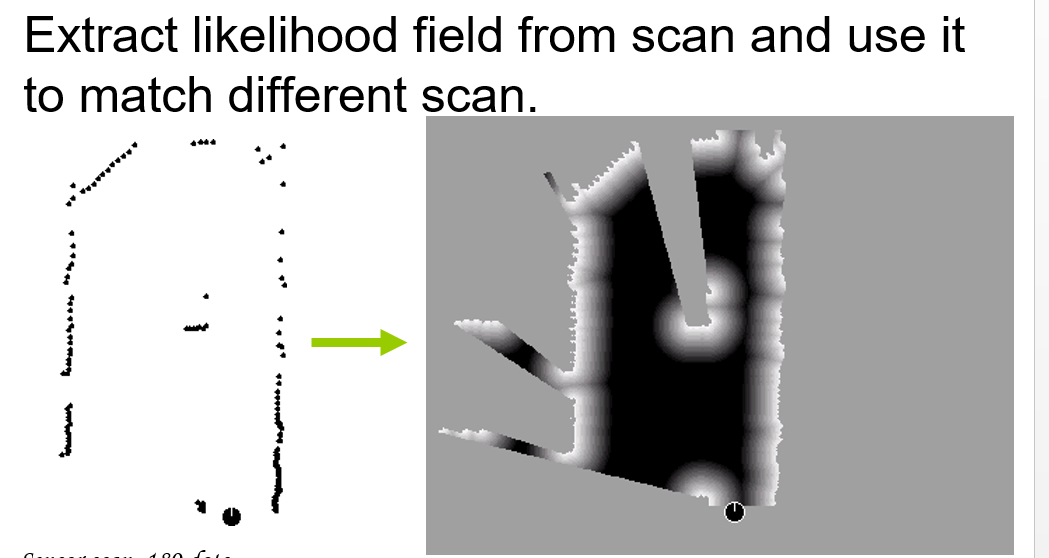 I am trying to implement a scan matcher using Scan based sensor model but I cant figure out how to estimate likelihood for a particular scan. Is there any implementation available ? Would be thankful for help
I am trying to implement a scan matcher using Scan based sensor model but I cant figure out how to estimate likelihood for a particular scan. Is there any implementation available ? Would be thankful for help

Can you please clarify how this is related to ROS? With over 35000 questions, we try to stay on-topic as much as possible.
For more general robotics related questions, I'd refer you to
robotics.stackexchange.com.