
URDF joint not Rotate about its origin


Hi all ,
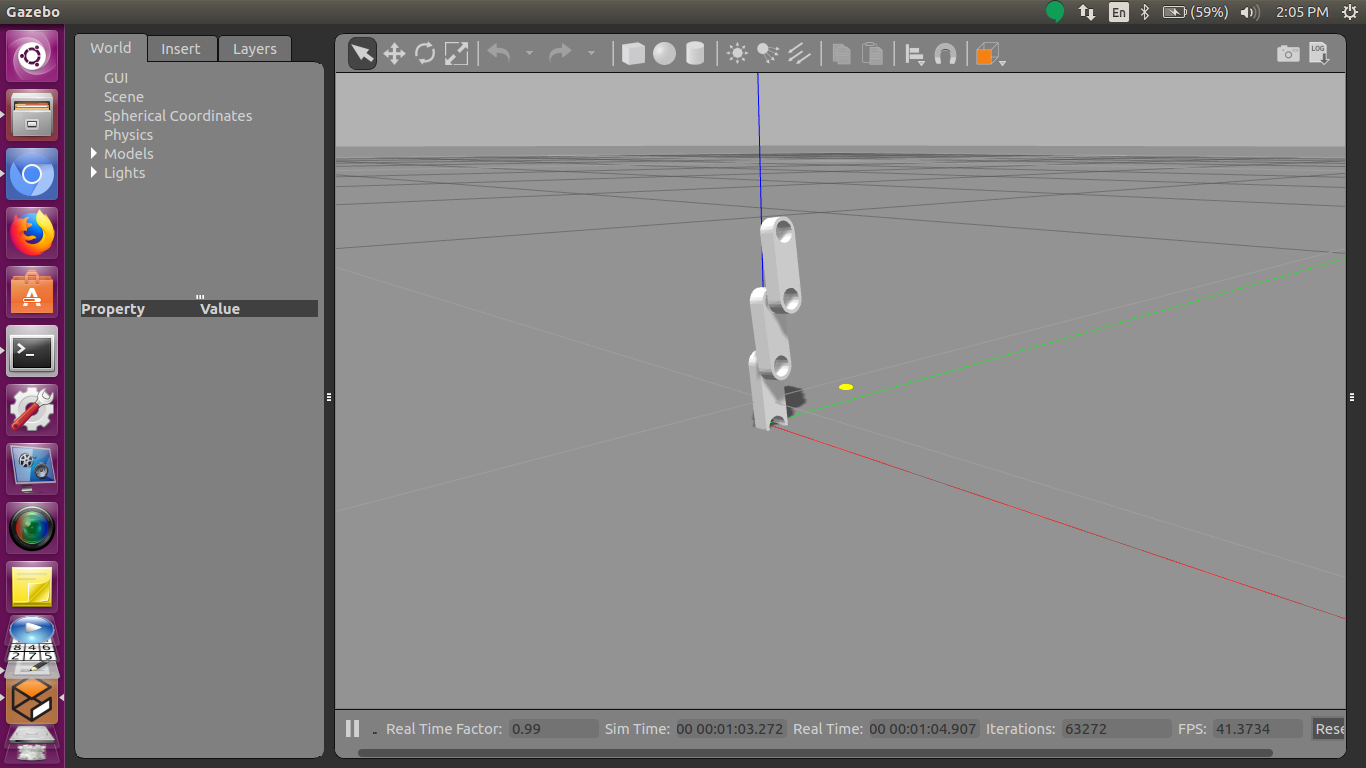
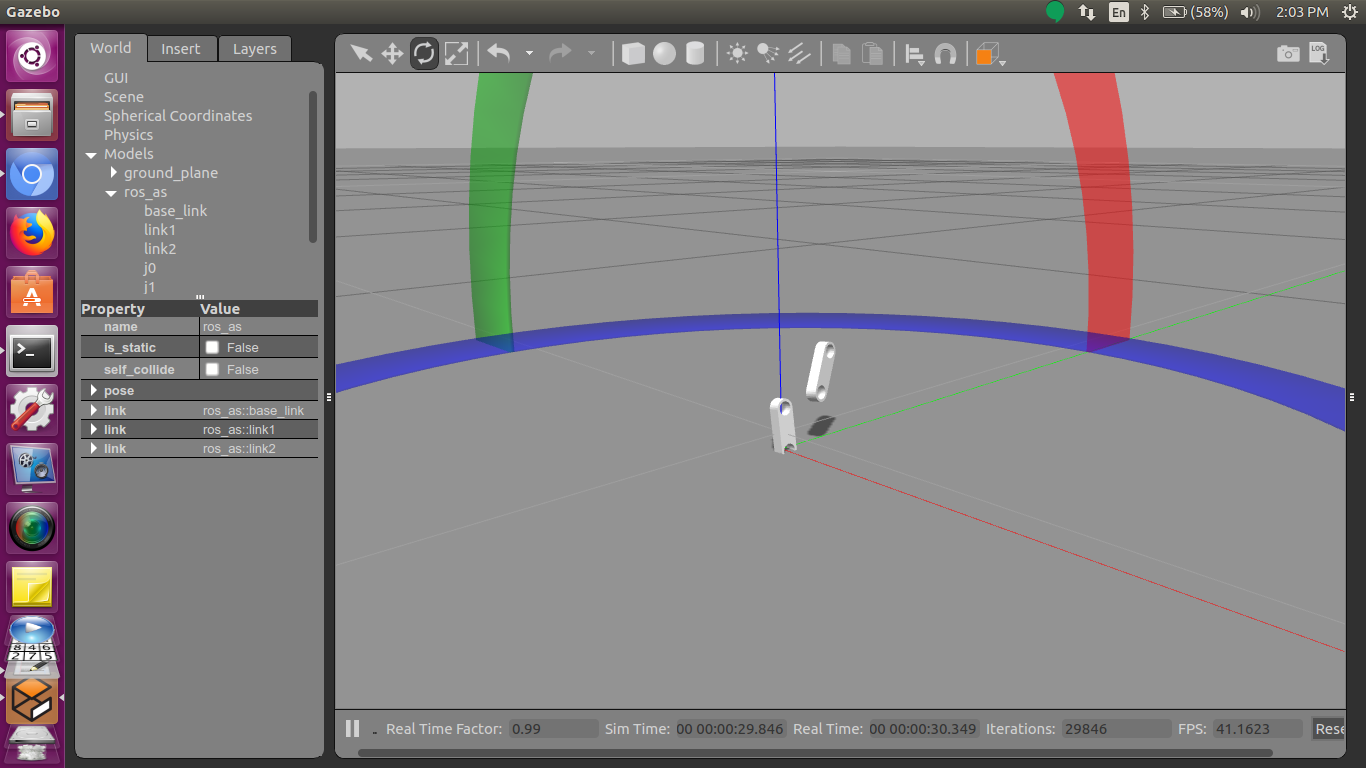
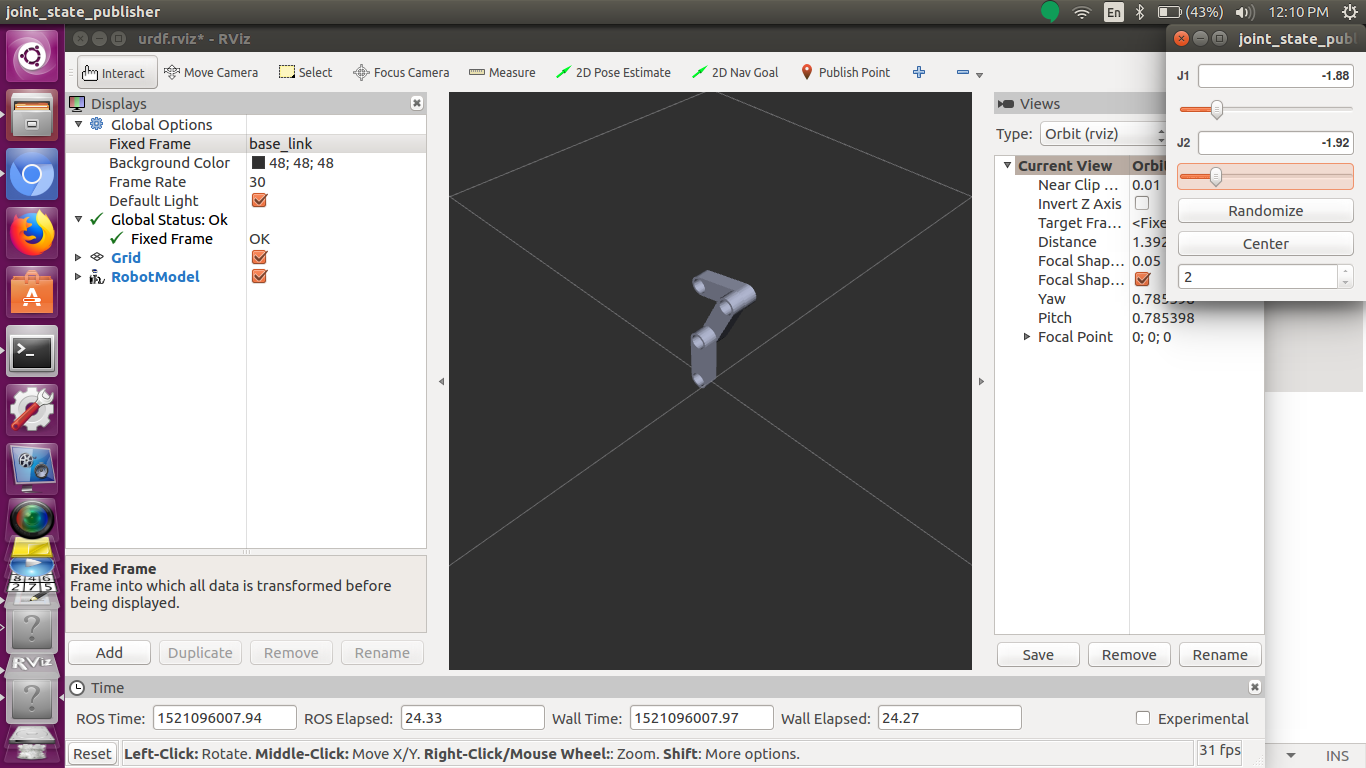
I create a one URDF file from Solidworks and i tried to rotate its joint . then i get Wrong origin of joint . i mean when i rotate joint of Robotic arm its rotate about its base joint not about its axis . i need to define cooridante frame in specific direction or need to create every joint cooridante system in specific directions
here is my URDF code :-
<?xml version ="1.0"?>
<robot name="ros_as">
<link name="world"/>
<link name="base_link">
<inertial>
<mass value="0.11529" />
<inertia ixx="9.8E-05" ixy="-1.15E-05" ixz="8.6465E-05" iyy="4.444E-05" iyz="-3.4586E-05" izz="4.73321E-05" />
</inertial>
<visual>
<origin xyz="0 0 0" rpy="0 -1.7 0" />
<geometry>
<mesh filename="package://ros_as/meshes/base_link.STL" />
</geometry>
<material name="">
<color rgba="0.77647 0.75686 0.73725 1" />
</material>
</visual>
</link>
<link name="link1">
<inertial>
<mass value="0.11529" />
<inertia ixx="1.2008E-05" ixy="-4.262E-05" ixz="-2.59095E-05" iyy="2.743395E-05" iyz="4.1807E-05" izz="2.794303E-05" />
</inertial>
<visual>
<origin xyz="0.001 -0.038 0.02" rpy="-1.7 0 0" />
<geometry>
<mesh filename="package://ros_as/meshes/link1.STL" />
</geometry>
<material name="">
<color rgba="0.77647 0.75686 0.73725 1" />
</material>
</visual>
</link>
<link name="link2">
<inertial>
<mass value="0.11529" />
<inertia ixx="3.46069E-05" ixy="-7.86556E-05" ixz="-1.295125E-05" iyy="7.548495E-05" iyz="1.42141E-05" izz="7.410357E-05" />
</inertial>
<visual>
<origin xyz="0.001 -0.066 0.05" rpy="-1.7 0 0" />
<geometry>
<mesh filename="package://ros_as/meshes/link2.STL" />
</geometry>
<material name="">
<color rgba="0.77647 0.75686 0.73725 1" />
</material>
</visual>
</link>
<joint name="j0" type="fixed">
<parent link="world" />
<child link="base_link" />
<origin xyz="0 0 0" rpy="0 0 0" />
</joint>
<joint name="j1" type="revolute">
<parent link="base_link" />
<child link="link1" />
<origin xyz="0.03593 0 0" rpy="-1.5708 0 1.657" />
<axis xyz="0 0 1" />
<limit lower="-3.14" upper="3.14" effort="20" velocity="5" />
</joint>
<joint name="j2" type="revolute">
<parent link="link1" />
<child link="link2" />
<origin xyz="0 -0.01 -0.03593" rpy="0 0.034067 0" />
<axis xyz="0 0 1" />
<limit lower="-3.14" upper="3.14" effort="20" velocity="5" />
</joint>
<transmission name="tran0">
<type>transmission_interface/SimpleTransmission</type>
<joint name="j1">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor0">
<hardwareInterface>PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<transmission name="tran1">
<type>transmission_interface/SimpleTransmission</type>
<joint name="j2">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="motor1">
<hardwareInterface>PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
<gazebo>
<plugin name="control" filename="libgazebo_ros_control.so"/>
</gazebo>
</robot>

Can you edit your question to put your urdf code wiht the preformatted text (
101010button orCTRL+K) ?@Delb Done Sir