UI for controlling a robotic arm

Hey , i recently started working on robotic manipulators .
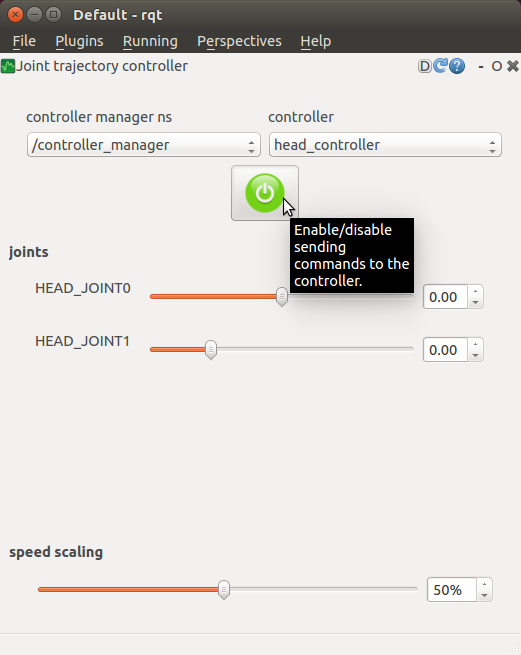
I have in my possession a 6DOF , servo based robotic arm , run using PCA9685 and Arduino(ros_serial is used ). I can control the arm vai RQT or "rostopic pub ** ".
Before moving onto move_it module , i want to manually control the robotic arm using a UI .
I was thinking something like a web based UI with sliders for controlling the individual servos , how may i proceed ?
How do people generally control robotic arms vai manual method?
add a comment