
Failed to create local planner.
Hi, I have created my own customized local planner. When I compile it, there were no errors. But when I try to run my robot using the local planner, it showed the following error
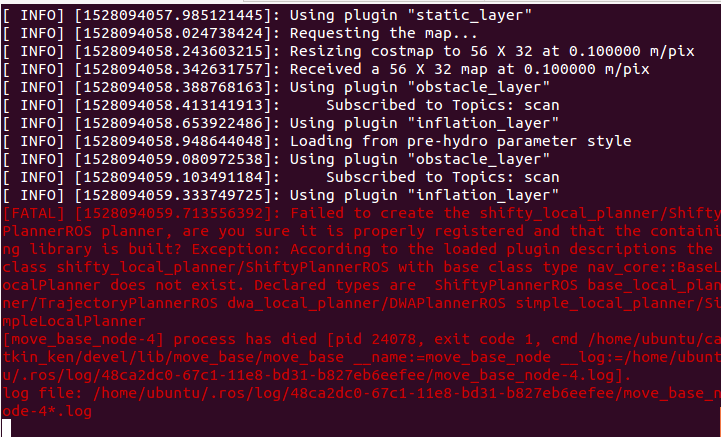
I have checked move_base.xml file, there is no error. I cross-checked using the command
rospack plugins −−attrib=plugin nav_core
This shows that nav_core exported the new created shifty_local_planner. But when I roslaunch it, it throws this error. Could you tell me exactly where is the problem?
Thank You.



Please don't use an image to display text. Images are not searchable and people cannot copy and paste the text from the image. Please update your question with a copy and paste of the error instead (using the
101010button to enable formatting).