
Why maps built through gmapping are so different from the actual environment, although it looks very similar.
Greeting everyone,
Sorry to disturb you all again,
I have been trying SLAM these days,
I found out why the built map is always bigger than the actual environment.
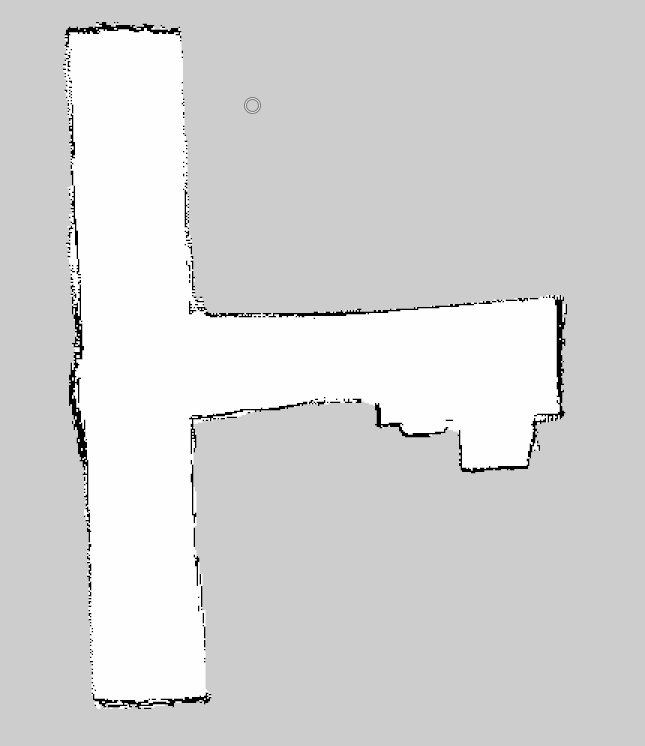
This is built by Gmapping. Area is 46m²
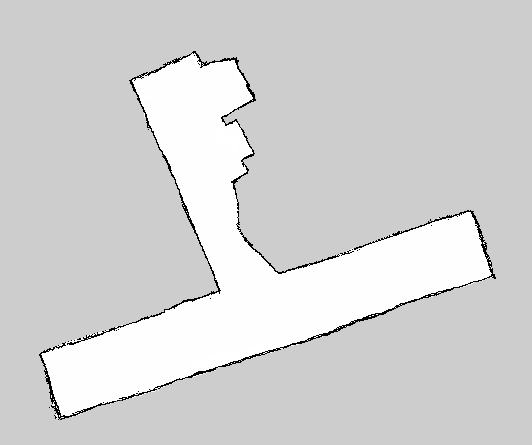
This is what I painted according to the actual scene. Area is 37m²
Is it because the odometer error causes the map to be larger than the actual?
If so, how can I correct it?
Cheers!!
add a comment
