
Pointers towards using robot_localization for VO + Wheel odometry

Hey , i am trying to setup a EKF fusion for combining odometry coming from two topics
- Visual Odometry (X , Y and yaw)
- Wheel Encoders ( X , Y and yaw)
The main source of Odometry is coming from wheel encoders , the visual odometry is there much like a correction mechanism like while using IMUs. Having said that , my VO node publishes Twist values , is it better to fuse the wheel odometry using Twist values using robot_localization ?
I am getting the following error when i launch rviz to view the odometry
Assertion `!pos.isNaN() && "Invalid vector supplied as parameter"' failed.
I am confused with how the TF should be setup . The TF of wheel encoder odometry is as follows
frame_id: "odom"
child_frame_id: "base_link"
TF of the visual Odometry is as follows
frame_id: "raspicam"
child_frame_id: ''
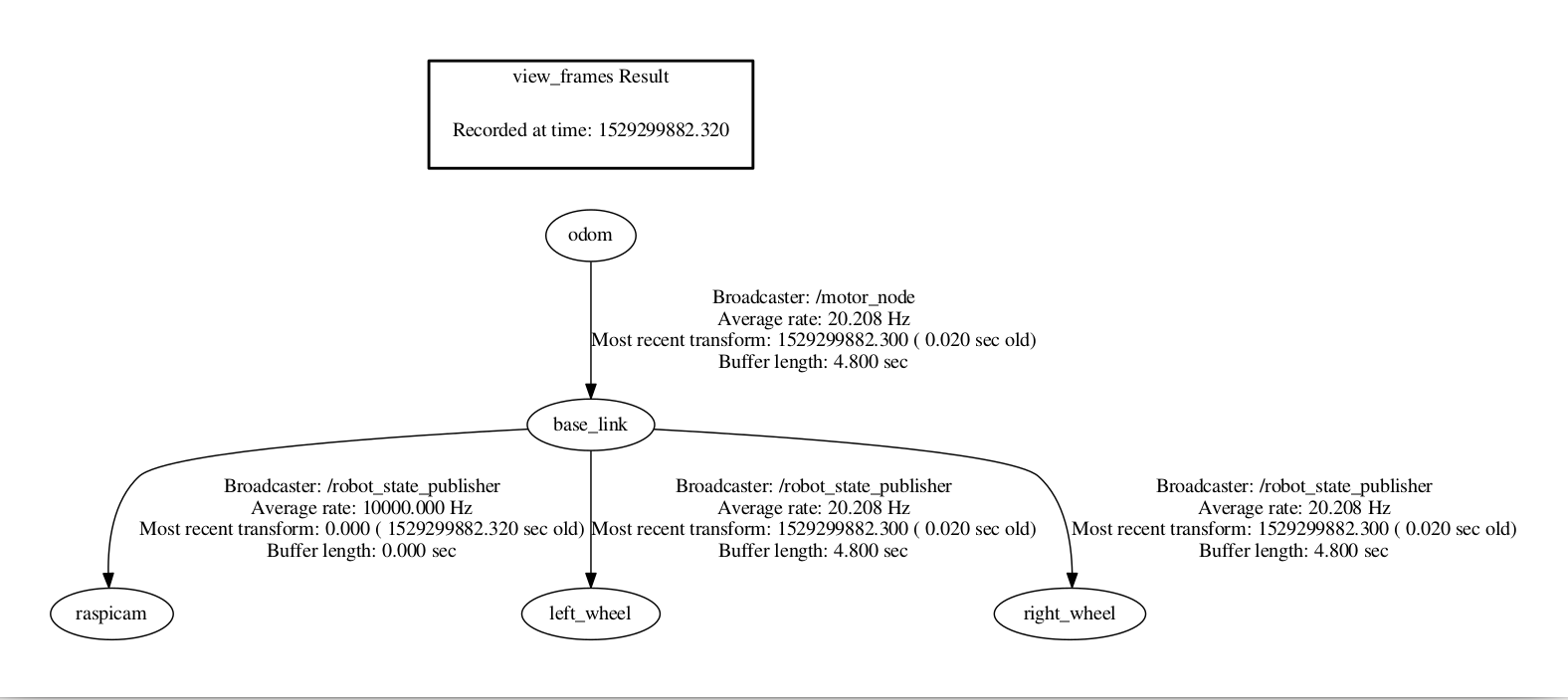
AFTER LAUNCHING THE EKF NODE
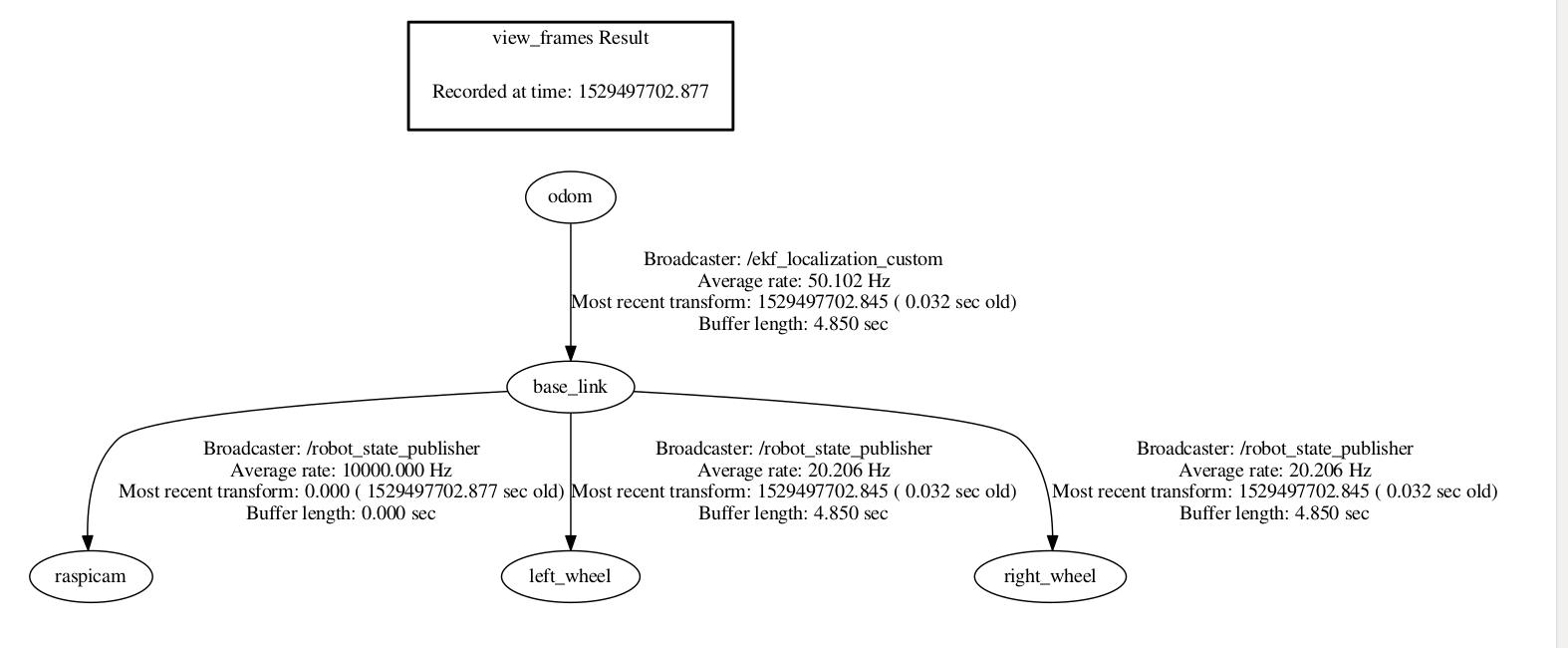
BEFORE LAUNCHING THE EKF NODE
* MY EKF LAUNCH FILE LOOKS LIKE THIS *
<node pkg="robot_localization" type="ekf_localization_node" name="ekf_localization_custom" clear_params="true"> <!-- renamed to ekf_localization_custom to prevent name conflicts -->
<param name="frequency" value="30"/> <!-- this value should be fine -->
<param name="sensor_timeout" value="0.1"/> <!-- this value should be fine -->
<param name="two_d_mode" value="false"/> <!-- could make this true to stick to XY plane.. -->
<!-- based these values off of the ROScon presentation -->
<param name="map_frame" value="map"/>
<param name="odom_frame" value="odom"/>
<param name="base_link_frame" value="base_link"/>
<param name="world_frame" value="odom"/>
<param name="odom0" value="/optical_flow"/>
<param name="odom1" value="/ubiquity_velocity_controller/odom"/>
<!-- settings for using Twist -->
<rosparam param="odom0_config">[false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]</rosparam>
<rosparam param="odom1_config">[false, false, false,
false, false, true,
true, true, false,
false, false, true,
false, false, false]</rosparam>
<param name="odom0_differential" value="false"/>
<param name="odom1_differential" value="false"/>
<param name="publish_null_when_lost" value="false"/>
<param name="odom0_relative" value="false"/>
<param name="odom1_relative" value="false"/>
<param name="odom0_queue_size" value="10"/>
<remap from="/odometry/filtered" to="/odometry/visual" />
</node>
[EDIT #1 adding sensor data samples ]
Wheel Odometry
header:
seq: 3786
stamp:
secs: 1529497452
nsecs: 845127379
frame_id: "odom"
child_frame_id: "base_link"
pose:
pose:
position:
x: 0.50
y: 0.20
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.01
w: 1.0
covariance: [0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2]
twist:
twist:
linear:
x: 0.8334
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.1233
covariance: [0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.2, 0.0, 0.0, 0.0, 0.0, 0.0, 0 ...

Please post sample messages for every sensor input.
Hey , I have edited the question and added the sample data . I think I have resolved the issue of rviz crashing , it was because the TF not set properly .
Now ,The covariance on the fussed output keeps building up into a larger and larger value. How do I systematically tackle this ?