
Can RVIZ2 connect to ROS(Kinectic) TOPICS.
Is there away to get RVIZ2 on my windows10 computer to connect to a Intell realsense camera running on a nvidia TX2 ubuntu ROS(kinectic) computer? I can get RVIZ to work as long as I am running RVIZ on a ROS ubuntu computer, but I need to be able to connect RVIZ from a windows10 computer. Since only RVIZ2 and RVIZ1 will run on windows10 that is my only choice left. I have tried getting RVIZ to work by installing ubuntu natively on windows10...but I was not able to get the video to stream into the Xming terminal. I could see the ROS Topics in Xming...just no video. So now I am trying to get RVIZ2 working in windows.
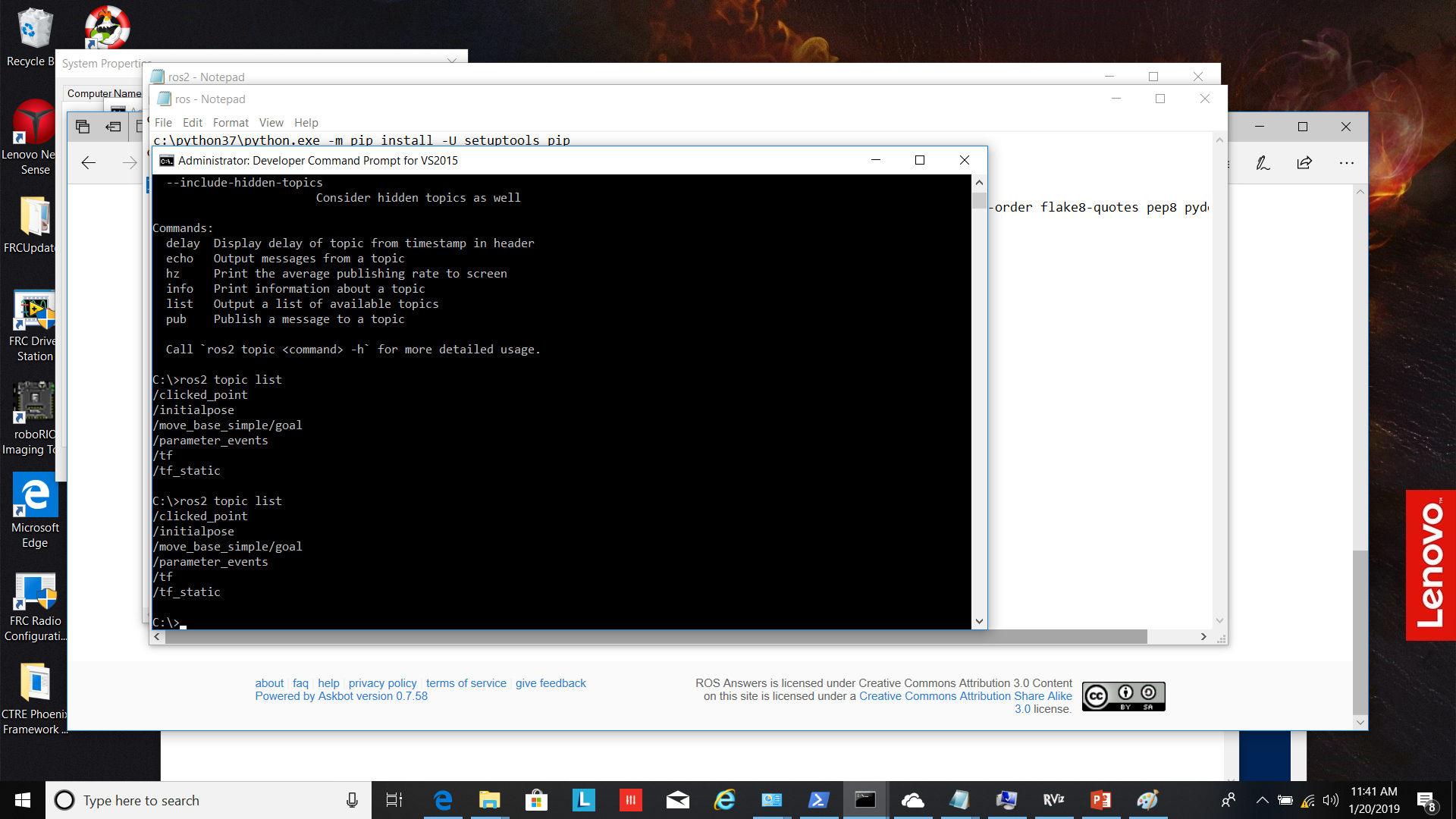
I am new to ROS2, but I was able to get the ROS2 Windows-Install-Binary working. I installed OpenSplice for Crystal.
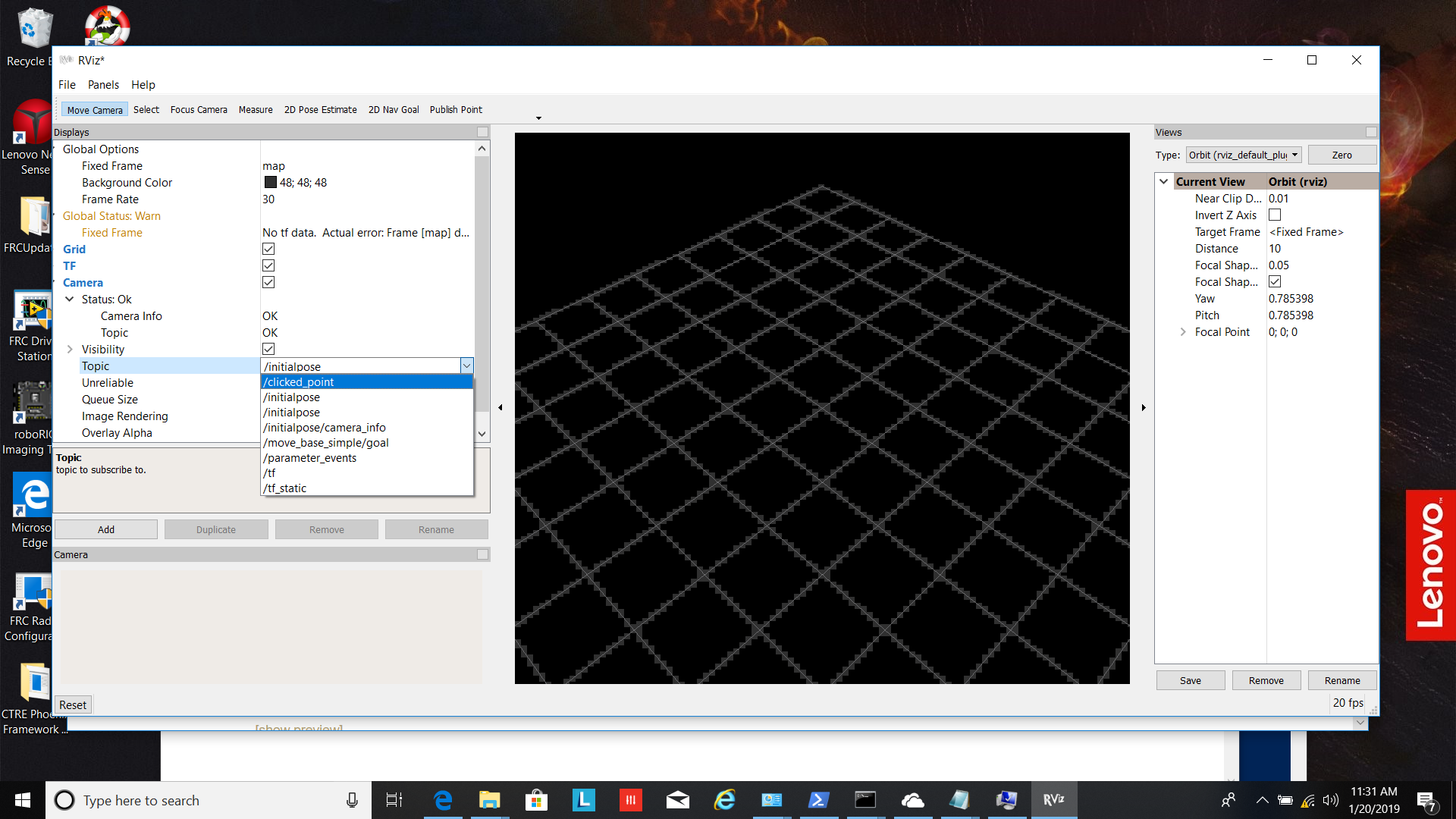
I can start rviz2 from command prompt, and add a camera...but as I would expect the Topic has a status Error- Error Subscribing: Empty Topic name. There are no RealSense Topics to attach to.
I know from running rviz on an ubuntu computer there are some other prerequisites like.. exporting my ROS_IP and exporting to the ROS_MASTER_URI=http://xx.xx.xx.xx:11311 that have to be done before I can launch rviz. So how does ROS2 do this? Can ROS2 get topics from ROS master?!

{kind=link}
Probably not a full solution, but just leaving this here: Bringing the power of Windows 10 to the Robot Operating System.