
Rviz shows robot in a "crippled way" using MotionPlanning
Anytime I run Rviz and use Motionplanning the robot is not shown the way it should be... Right now I am trying to follow this tutorial: https://www.youtube.com/watch?v=j6bBx...
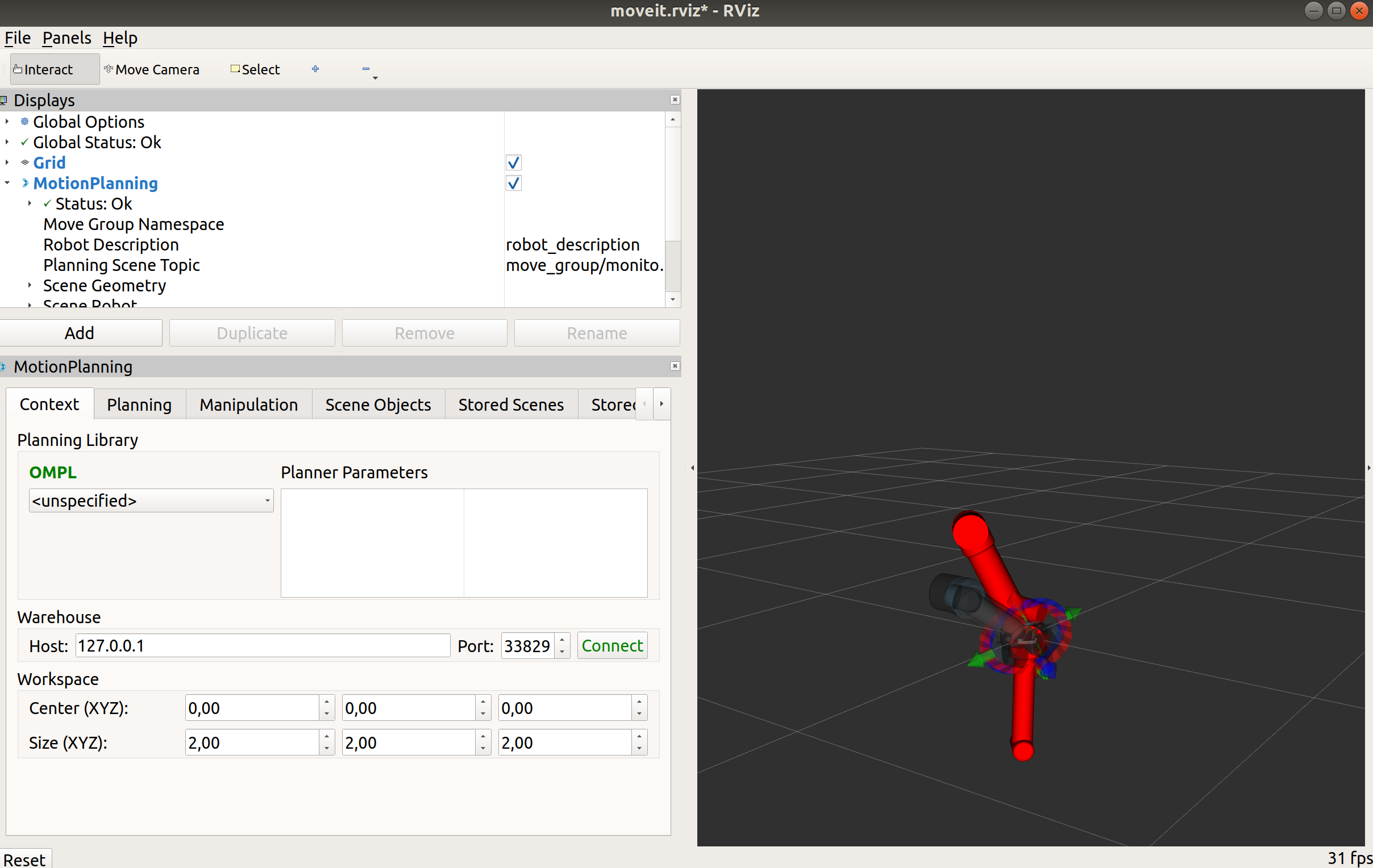
and as soon as I run the created launch file rviz pops up and shows me a strange representation of my ur5. It looks like every single link is connected to the base link. I had the same issue when I tried the moveit Panda Tutorial. If I only add the robot model it looks fine, but as soon as I add the MotionPlanning it gets weird. Execution from there almost never works...
2 erros I see in the bash (dunno if they are responsible for the behaviour):
[ERROR] [1553171470.019237215, 407.916000000]: Could not find the planner configuration 'None' on the param server
[ WARN] [1553171477.355538521, 413.008000000]: Waiting for arm_contoller/follow_joint_trajectory to come up
[ INFO] [1553171481.580805297, 416.272000000]: Failed to call service get_planning_scene, have you launched move_group? at /tmp/binarydeb/ros-melodic-moveit-ros-planning-0.10.8/planning_scene_monitor/src/planning_scene_monitor.cpp:495
[ INFO] [1553171482.618004378, 416.826000000]: Constructing new MoveGroup connection for group 'manipulator' in namespace ''
[ WARN] [1553171487.914143567, 419.010000000]: Waiting for arm_contoller/follow_joint_trajectory to come up
[ERROR] [1553171496.372846748, 425.010000000]: Action client not connected: arm_contoller/follow_joint_trajectory
I would be glad if you can explain in the easiest way, since I am new to everything (linux, Ros, C++).
Thanks, Joel
Edit: Output locale: (sorry that it doesn't look pretty with a grey background, no idea how to paste it that way)
LANG=de_DE.UTF-8
LANGUAGE=
LC_CTYPE="de_DE.UTF-8"
LC_NUMERIC=en_US.UTF-8
LC_TIME="de_DE.UTF-8"
LC_COLLATE="de_DE.UTF-8"
LC_MONETARY="de_DE.UTF-8"
LC_MESSAGES="de_DE.UTF-8"
LC_PAPER="de_DE.UTF-8"
LC_NAME="de_DE.UTF-8"
LC_ADDRESS="de_DE.UTF-8"
LC_TELEPHONE="de_DE.UTF-8"
LC_MEASUREMENT="de_DE.UTF-8"
LC_IDENTIFICATION="de_DE.UTF-8"
LC_ALL=

I don't know if I am getting it right. So I just copied this line now into my terminal:
export LC_NUMERIC="en_US.UTF-8"
nothing happens. Problem remains, also after reboot.
A reboot would have reset everything to the default situation, so that would be expected.
Can you show us the output of
locale(run it in a terminal, copy-paste the output)?And please attach a screenshot of RViz to your question. Use the
editbutton to add it to your original question text.This could still be #q272692.
But first: can you show us a screenshot of
rqt_graphwhen you have everything running?And which launch files do you use?
Just adding the MoveIt RViz plugin without having the correct parameters and nodes loaded will not work.
As to the potential locale problem: you can test that by switching your machine to use the
en_US.UTF-8locale globally. This will (temporarily) turn your machine to English, but you can switch that back later. To switch it, use the Region & Language section of the System Settings panel.Switch it to English (US), confirm the change, save and log out and then log in.
Now try again.
Thanks! Changing the language to english (US) and afterwards executing the code I used earlier (havn't checked yet if the code is really necessary), made the robot look all pretty now. Apparently I can plan, but now it tells me the following errors
I checked the files in the config data but the joints are always named as listed in the error... I am not sure if I had this error before, but I believe I didn't...
Ok, so it was the locale issue then.
It would seem the comment by @RikTonnaer was actually correct.
I'll convert that into an answer for you to accept.
As to your new/other problem: please post a new question for that. Posting follow-up questions in comments like that is not a good practice.