
Is it possible to use rtabmap_ros with only scan data?
I would like to use rtabmap_ros package to map an indoor environment. However, my robot has only odometry and laserscan data. Can I use, rtabmap_ros as a SLAM algorithm for my case? When I check Setup RTAB_MAP on your Robot, I couldn't see any configuration which uses odom + scan information. It seems I have to have a kinect sensor to use this package, but I would like to be sure.
I have already tried hector_slam, gmapping and cartographer_ros. I am trying hopelessly to find another possible SLAM algorithm which could give better performance for my case.
You can see my other question
Thank you for your help!
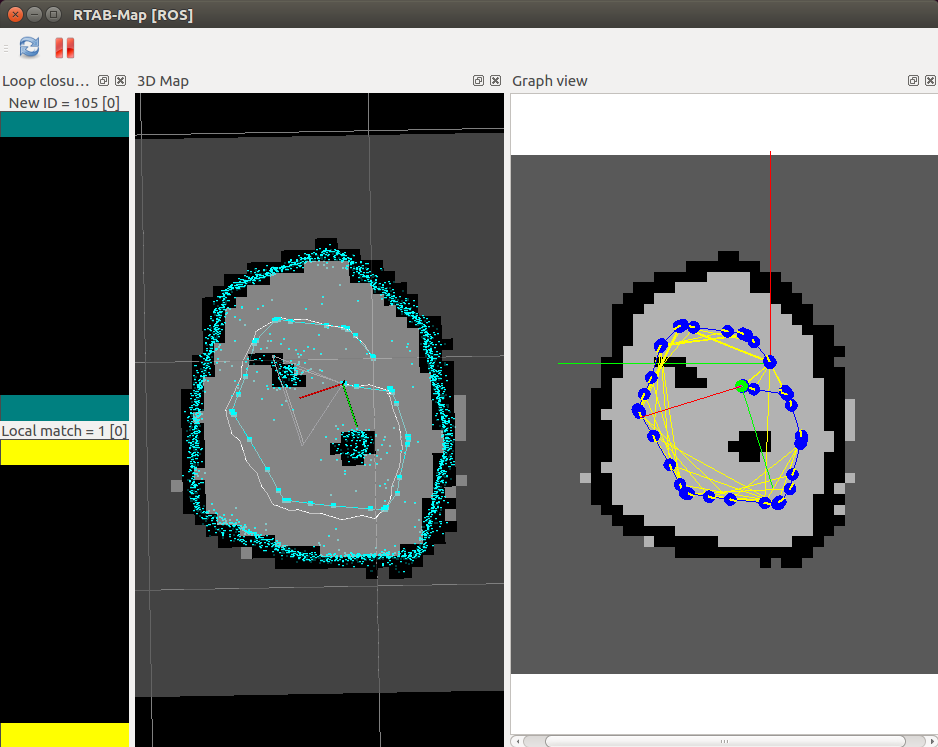
Edit: @matlabbe , Thank you very much for your answer. I directly used your launch file with the provided realoguz5.bag file as you mentioned. I also removed map frame from the bagfile and tried with that bagfile, . However, I couldn't see any map in either Rviz or Rtabmap_viz.You can see the terminal output of test.launch below. Could you help me further to solve this issue? Thank you very much!
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.13
* /rtabmap/rtabmap/RGBD/NeighborLinkRefining: True
* /rtabmap/rtabmap/Reg/Force3DoF: True
* /rtabmap/rtabmap/Reg/Strategy: 1
* /rtabmap/rtabmap/frame_id: base_link
* /rtabmap/rtabmap/odom_frame_id: odom
* /rtabmap/rtabmap/odom_tf_angular_variance: 0.05
* /rtabmap/rtabmap/odom_tf_linear_variance: 0.01
* /rtabmap/rtabmap/subscribe_depth: False
* /rtabmap/rtabmap/subscribe_rgb: False
* /rtabmap/rtabmap/subscribe_scan: True
* /rtabmap/rtabmap/wait_for_transform_duration: 1
* /use_sim_time: True
NODES
/rtabmap/
rtabmap (rtabmap_ros/rtabmap)
rtabmapviz (rtabmap_ros/rtabmapviz)
ROS_MASTER_URI=http://localhost:11311
process[rtabmap/rtabmap-1]: started with pid [11259]
process[rtabmap/rtabmapviz-2]: started with pid [11260]
[ INFO] [1556631047.098153064]: Starting node...
[ INFO] [1556631047.152156112]: Initializing nodelet with 8 worker threads.
[ INFO] [1556631047.194421357]: Starting node...
[ INFO] [1556631047.305024760]: rtabmapviz: Using configuration from "/home/alperen/.ros/rtabmapGUI.ini"
[ INFO] [1556631048.460661263]: Reading parameters from the ROS server...
[ INFO] [1556631048.609303406]: Parameters read = 0
[ INFO] [1556631049.355704547]: /rtabmap/rtabmapviz: queue_size = 10
[ INFO] [1556631049.355738290]: /rtabmap/rtabmapviz: rgbd_cameras = 1
[ INFO] [1556631049.355749637]: /rtabmap/rtabmapviz: approx_sync = true
[ INFO] [1556631049.358946567]:
/rtabmap/rtabmapviz subscribed to:
/rtabmap/odom
[ INFO] [1556631049.359086913]: rtabmapviz started.
[ INFO] [1556631072.496810848, 1555961484.412100329]: /rtabmap/rtabmap(maps): map_filter_radius = 0.000000
[ INFO] [1556631072.496924727, 1555961484.412100329]: /rtabmap/rtabmap(maps): map_filter_angle = 30.000000
[ INFO] [1556631072.496986324, 1555961484.412100329]: /rtabmap/rtabmap(maps): map_cleanup = true
[ INFO] [1556631072.497057702, 1555961484.412100329]: /rtabmap/rtabmap(maps): map_negative_poses_ignored = true
[ INFO] [1556631072.497116107, 1555961484.412100329]: /rtabmap/rtabmap(maps): map_negative_scan_ray_tracing = true
[ INFO] [1556631072.497174002, 1555961484.412100329]: /rtabmap/rtabmap(maps): cloud_output_voxelized = true
[ INFO] [1556631072.497228337, 1555961484.412100329]: /rtabmap/rtabmap(maps): cloud_subtract_filtering = false
[ INFO] [1556631072.497289089, 1555961484.412100329]: /rtabmap/rtabmap(maps): cloud_subtract_filtering_min_neighbors = 2
[ INFO] [1556631072.506124736, 1555961484.422174375]: /rtabmap/rtabmap(maps): octomap_tree_depth = 16
[ INFO] [1556631072.548256477, 1555961484.462396979]: rtabmap: frame_id = base_link
[ INFO] [1556631072.548287631, 1555961484.462396979]: rtabmap: odom_frame_id = odom
[ INFO] [1556631072.548303426, 1555961484.462396979]: rtabmap: map_frame_id = map
[ INFO] [1556631072.548327794, 1555961484.462396979]: rtabmap: tf_delay = 0.050000
[ INFO] [1556631072.548360511, 1555961484.462396979]: rtabmap: tf_tolerance = 0.100000
[ INFO] [1556631072.548484635, 1555961484.462396979]: rtabmap: odom_sensor_sync = true
[ INFO] [1556631072.966363444, 1555961484.884980407]: Setting RTAB-Map parameter "RGBD/NeighborLinkRefining"="true"
[ INFO ...

Note that it is preferred that you edit your question instead of adding new info in a new answer. You are using rtabmap 0.17.6, my example works only with 0.19. You have to build
rtabmap/rtabmap_rosfrom source. I edited my answer with that info.