
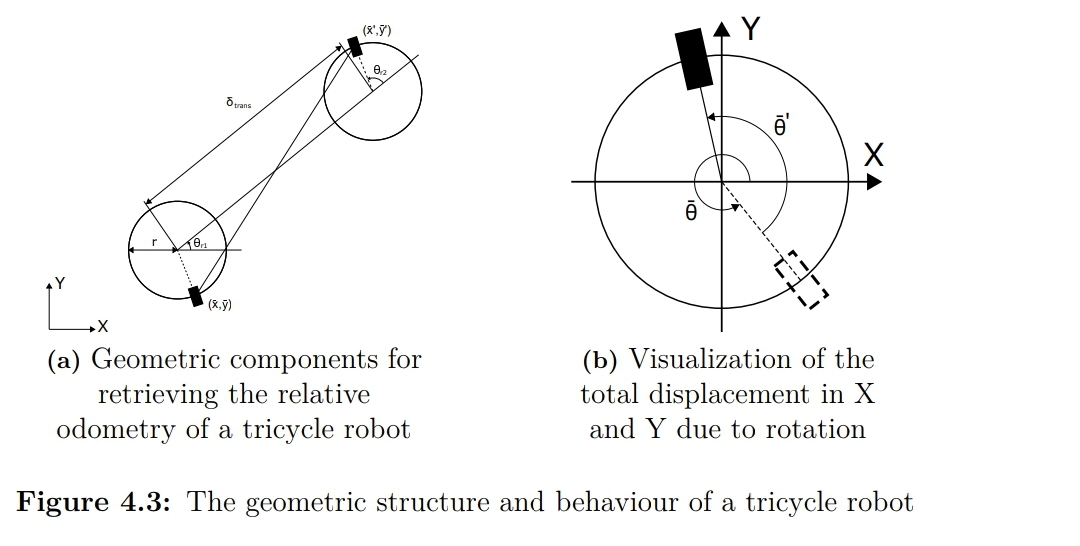
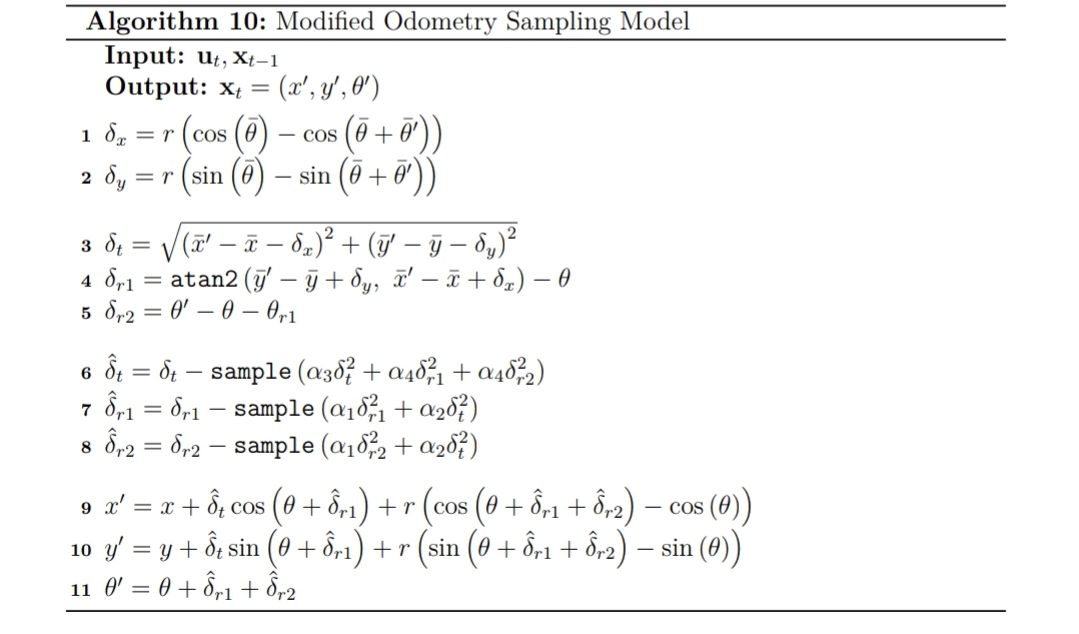
Motion model for tricycle robot for AMCL
Hello!
I have a robot with three wheels where the single front wheel is for steering and driving, this wheel also has an encoder that outputs x, y and angular velocity. I want to use AMCL to localize the robot, however, I am not sure if I can use the omni or diff motion model for this robot? Is it possible or do I need to write a new model?

Could you explain what y means in your encoder output?
The odometry coordinate system is fixed on the robot on the single front wheel with x facing forward and y facing to the left. So y measures how much the robot is turning, if the robot performs a pure rotation I have a non-zero y and angular velocity but a zero x.
Hi @hannesjk, I am working on same problem. Could you please share to your model, it would be great. Thanks
@ahmetunalunlu please don't post answers that are not actually answers. This is a Q&A site not a discussion forum. I've moved your answer to be a question comment. For more, please see the Support guidelines: http://wiki.ros.org/Support