Mapping with Zed Camera

Hi, i want to use our Stereolabs Zed Cam to get a map in Rviz. I set up zed-wrapper (and SDK and Cuda) successfully and startet the zed.launch file to get image data. The data is broadcasted to its topics and i can get it echoing the corresponding topics. Also in rqt the images can be shown. But if i open rviz i can't see anything. No image data, no pointcloud,...
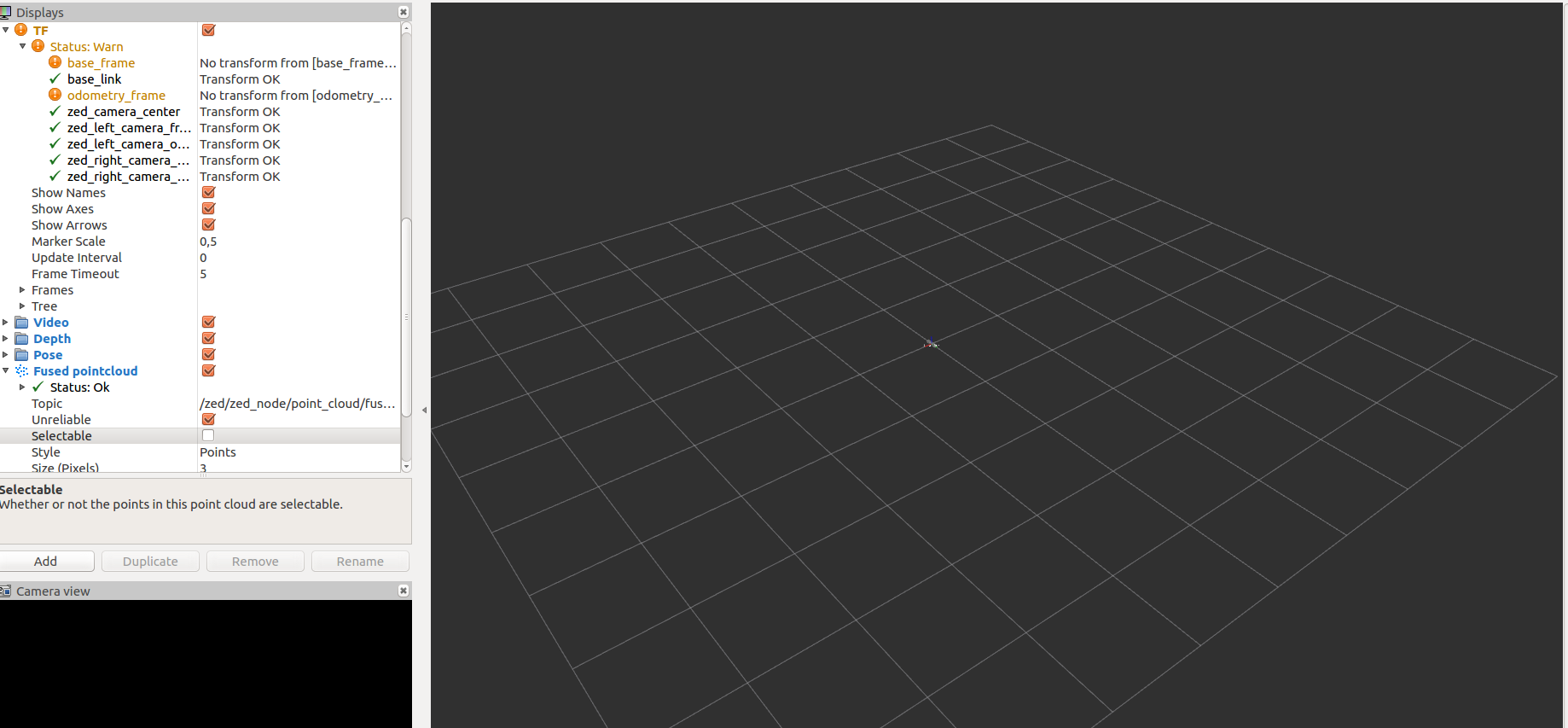
I loaded the rviz config file from stereolabs and the first different point on my system is: I have no map frame. There are only the following frames availabe: base_frame, base_link, odometry_frame, zed_camera_center, zed_{left,right}_camera_{optical}_frame.
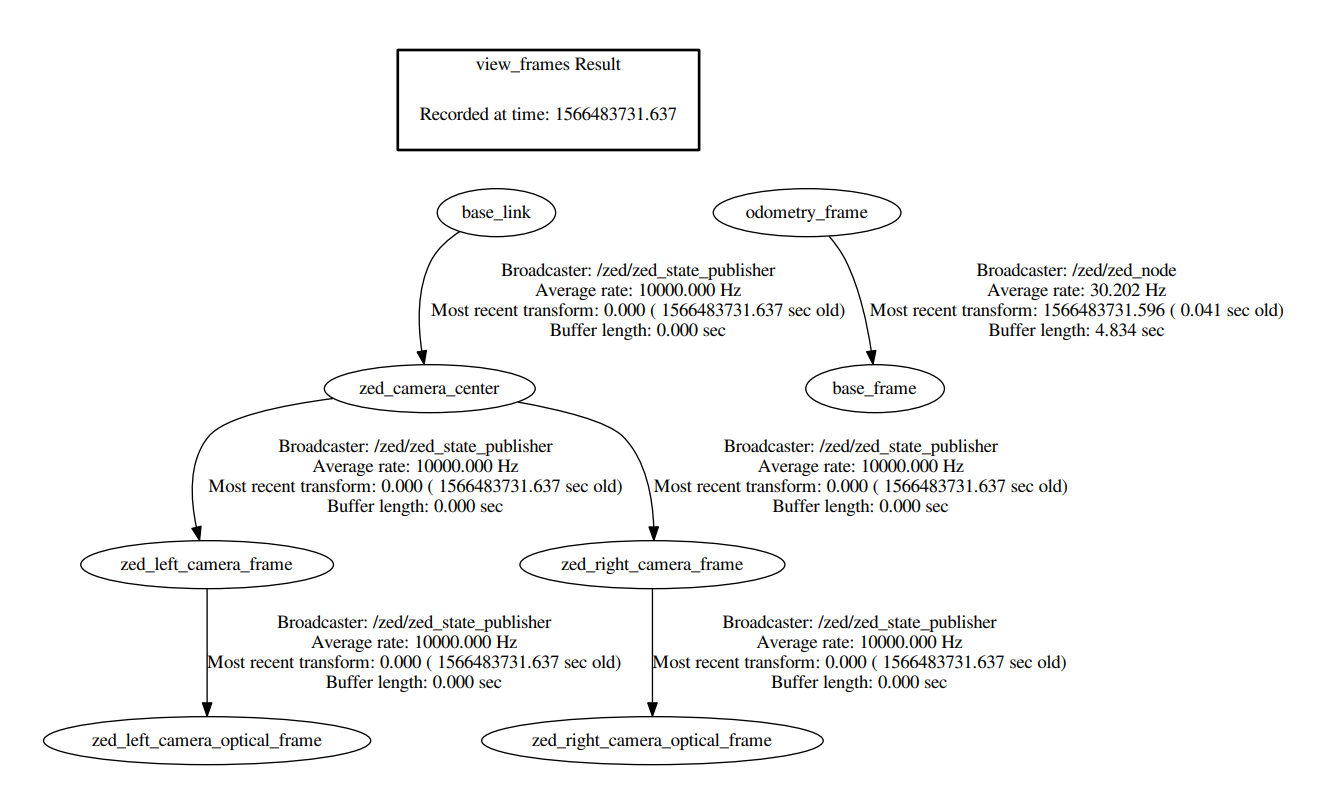
I found out it could be a problem with this tricky fixed frame and got the tf-tree attached below. There i can find two subtrees... Is this correct or is this my problem? With frame base_link chosen the rviz looks as in the image below. TF says "No transform from [base_frame] to frame [base_link]. I think this is a problem, but why and how to solve it?