
rosrun vs roslaunch
This is a continuation from this problem.
Eric Perko asked me to change odom_frame_id to odom_combined. (I need to change base_frame_id to base_footprint as well)
1st case rosrun:
I have managed to do it using rosrun
rosrun amcl amcl _base_frame_id:=base_footprint _odom_frame_id:=odom_combined
and it works base_frame_id is changed to base_footprint and odom_frame_id is changed to odom_combined.
however
2nd case roslaunch:
I tried using particularly these two lines (the complete code is shown at the bottom of this post amcl_diff_with_map_hwk.launch):
<param name="base_frame_id" value="base_footprint"/>
<param name="odom_frame_id" value="odom_combined"/>
The base_frame_id is changed to base_footprint however odom_frame_id is still the default value which is odom. (As shown in the rosparam get /amcl below)
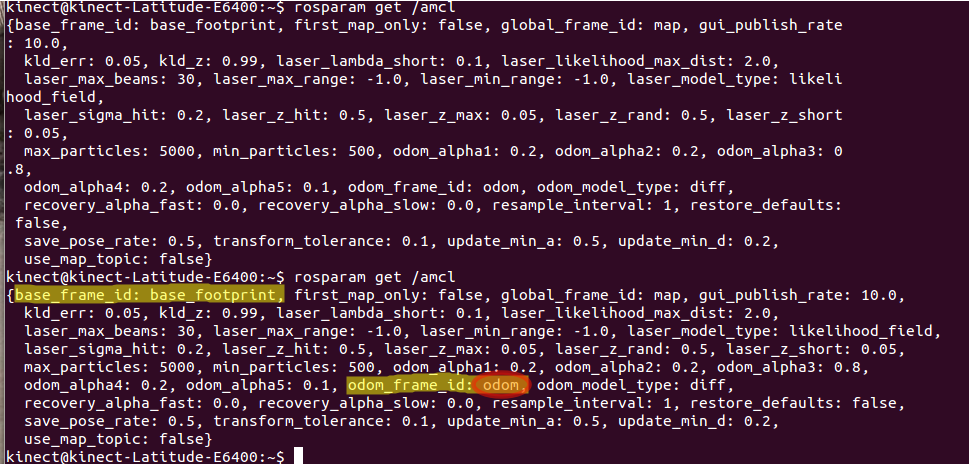
****Why the odom_frame_id stays the same in the launch file case?******
amcl_diff_with_map_hwk.launch:
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen">
<!--param name="use_map_topic " value="true"/ -->
<!-- Publish scans from best pose at a max of 10 Hz -->
<param name="odom_model_type" value="diff"/>
<param name="odom_alpha5" value="0.1"/>
<param name="base_frame_id" value="base_footprint"/>
<param name="odom_frame_id" value="odom_combined"/>
<param name="transform_tolerance" value="0.2" />
<param name="gui_publish_rate" value="10.0"/>
<param name="laser_max_beams" value="30"/>
<param name="min_particles" value="500"/>
<param name="max_particles" value="5000"/>
<param name="kld_err" value="0.05"/>
<param name="kld_z" value="0.99"/>
<param name="odom_alpha1" value="0.2"/>
<param name="odom_alpha2" value="0.2"/>
<!-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/>
<param name="odom_alpha4" value="0.2"/>
<param name="laser_z_hit" value="0.5"/>
<param name="laser_z_short" value="0.05"/>
<param name="laser_z_max" value="0.05"/>
<param name="laser_z_rand" value="0.5"/>
<param name="laser_sigma_hit" value="0.2"/>
<param name="laser_lambda_short" value="0.1"/>
<param name="laser_model_type" value="likelihood_field"/>
<!-- <param name="laser_model_type" value="beam"/> -->
<param name="laser_likelihood_max_dist" value="2.0"/>
<param name="update_min_d" value="0.2"/>
<param name="update_min_a" value="0.5"/>
<param name="odom_frame_id" value="odom"/>
<param name="resample_interval" value="1"/>
<param name="transform_tolerance" value="0.1"/>
<param name="recovery_alpha_slow" value="0.0"/>
<param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
move_base.launch:
<launch>
<master auto="start"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find not_good)/Maps/Slam/slam_map_dark2.pgm 0.05"/>
<!-- tf /map to /odom_combined -->
<!-- node pkg="tf" type="static_transform_publisher" name="map_to_odom_combined" args="100 100 0 0 0 0 /map /odom_combined 100"/ -->
<!--- Run AMCL -->
<include file="$(find not_good)/amcl_diff_with_map_hwk.launch" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find not_good)/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find not_good)/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find not_good)/local_costmap_params.yaml" command="load" />
<rosparam file="$(find not_good)/global_costmap_params.yaml" command="load" />
<rosparam file="$(find not_good)/base_local_planner_params.yaml" command="load" />
</node>
</launch>
run it using roslaunch move_base.launch
p.s. By the way the <param name="transform_tolerance" value="0.2" /> does not change the default value which is 0.1 as well.

