
When using rtabmap to build a map, how to fill the blanks in the map and remove objects outside the map?
The robot I use is turtlebot2, and I use a ZED stereo camera instead of an RGBD camera, without using a lidar sensor.
When I used the rtabmap algorithm to make my robot build a map in the room, I found that the results were as shown below:
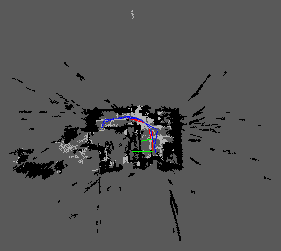
Radial black parts on the right, bottom, and left should not have appeared on the map because they are beyond the scope of the room.
I want to know how to remove them?
The light gray part in the middle (L-shaped, with path passing) is empty without obstacles. But they don't seem to be completely filled, and some are left blank (around the start and end of the path).
What should I do to make these areas that should be ground also marked light gray?
add a comment

