
Curvu local trajectories with teb_local_planner
Good afternoon,
I faced the problem and can't fix it related to teb_local_planner. The planner builds the global path very good, however, the local planner is very bad. It is very curved.
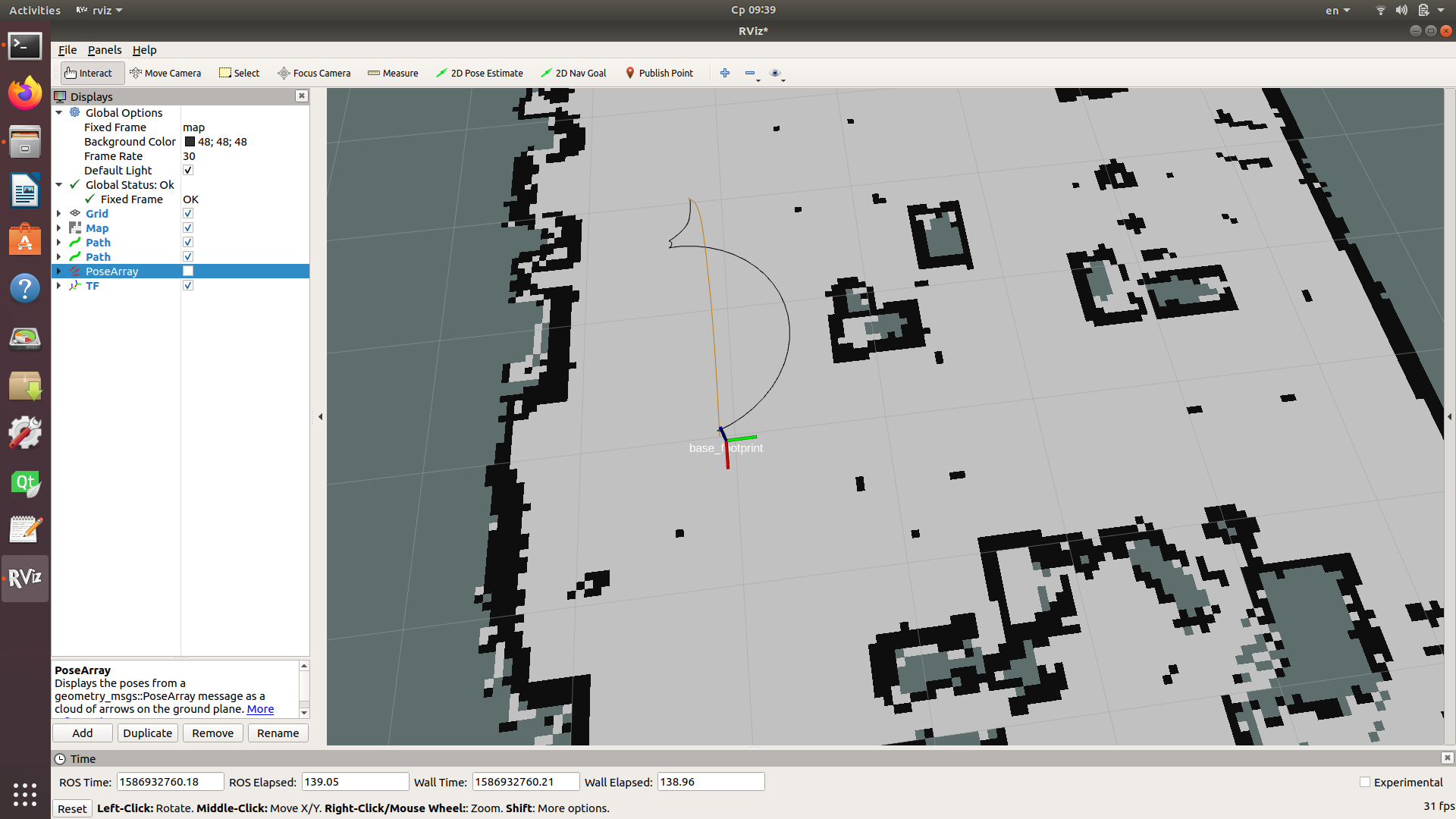
As you can see in the image above, the yellow line is a global path and the black one is a local path. My prediction is that probably I have to say to the planner that my robot can perform in_plac_rotation, but I don't know is it possible with teb_local_planner. Also maybe I have to forbid backward movements.
Does anyone have an idea about that problem?
Thank you Regards,
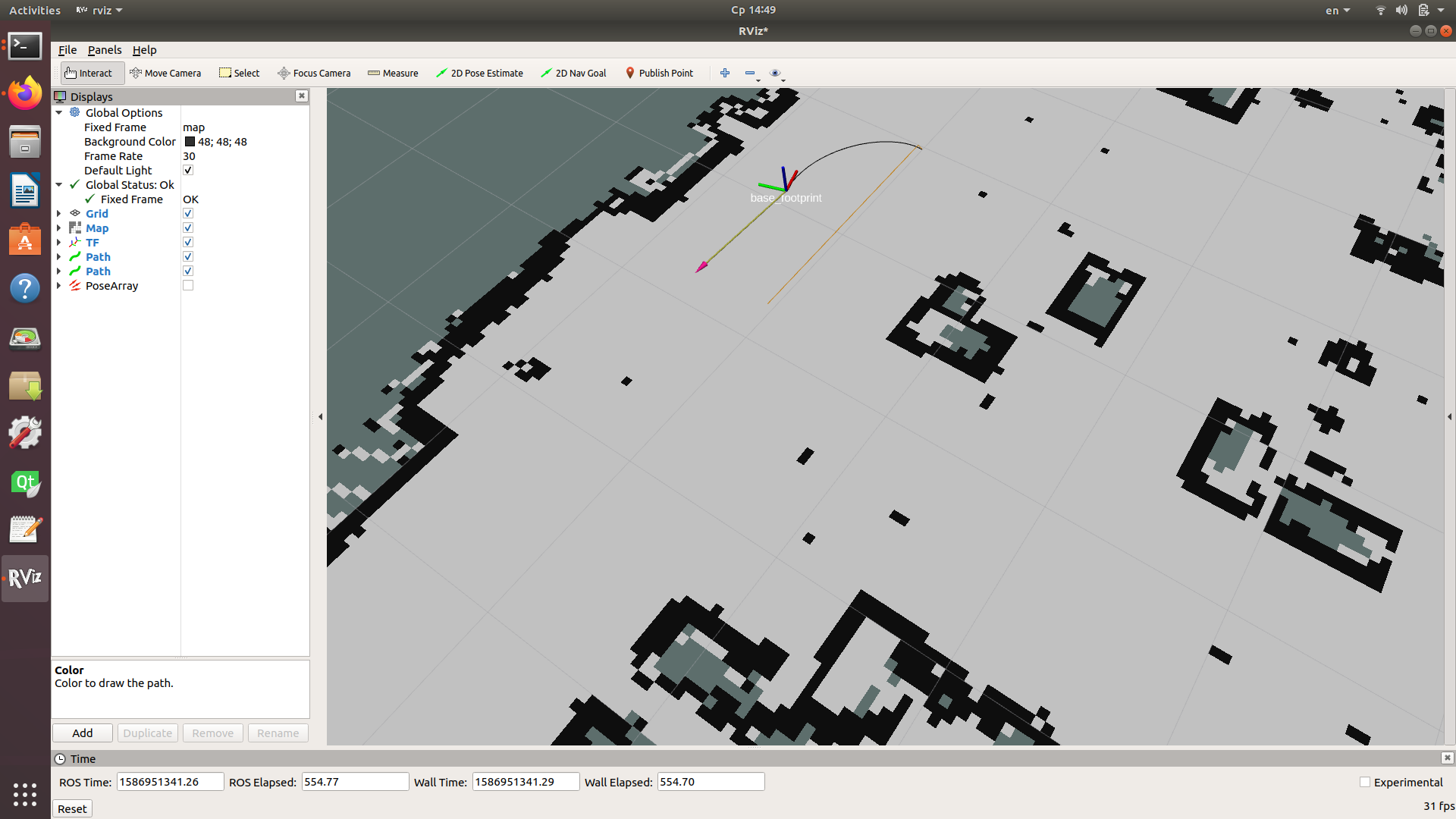
Additional photo,
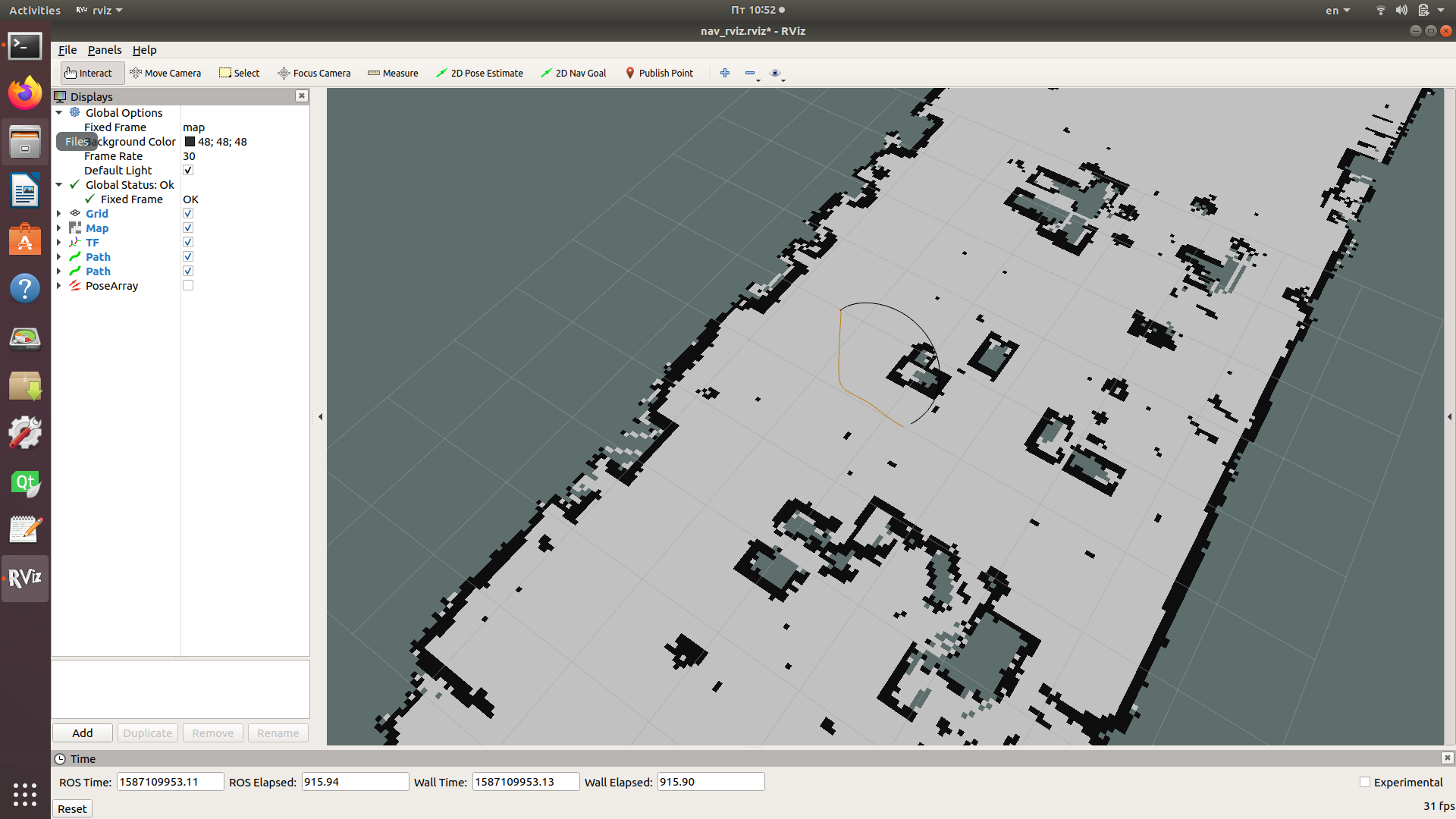
New problem,
add a comment
