
Problem with static transform publisher
Hello,
i have a Microsoft Kinect sensor and i am using the freenect driver to use it, Then I transform my pointcloud to a laserscan and show it on my base_link frame. I get the following error:
Transform failure: Lookup would require extrapolation into the past. Requested time 1594648338.669846591 but the earliest data is at time 1594648338.900337345, when looking up transform from frame [kinect_depth_optical_frame] to frame [base_link]
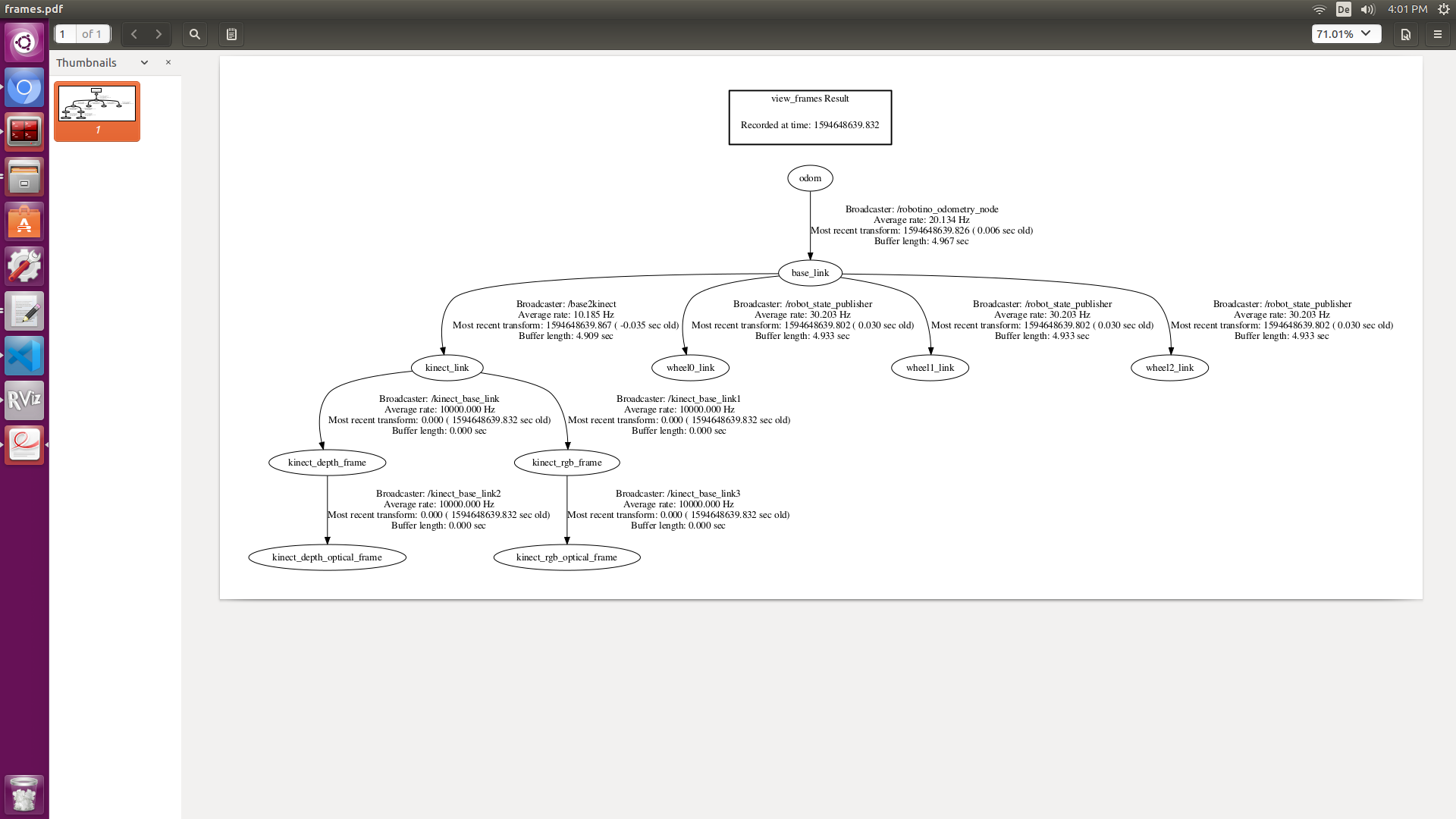
On the Image you can see the current Transformation tree. When you need some information than please tell me.
Regards, markus
add a comment

