Why there is a linear_acceleration in X direction for non moving imu 9250?
I am using mpu9250 by the package /jeskesen/i2c_imu and the launch file is:
<?xml version="1.0"?>
<launch>
<node pkg="tf" type="static_transform_publisher" name="imu_to_base"
args="0 0 0 0 0 0 base_link imu_link 50" />
<!--
<node name="i2c_imu_node" pkg="i2c_imu" type="i2c_imu_node" ns="imu" output="screen">
<param name="imu_frame" value="imu_link" />
-->
<node name="i2c_imu_node" pkg="i2c_imu" type="i2c_imu_node" output="screen">
<param name="imu_frame" value="imu_link" />
<param name="i2c_bus" value="1" />
<param name="i2c_slave_address" value="104" />
<!--imu_type:
0 = Auto discover
1 = Null (used when data is provided from a remote IMU
2 = InvenSense MPU-9150
3 = STM L3GD20H + LSM303D
4 = STM L3GD20 + LSM303DLHC
5 = STM LSM9DS0
6 = STM LSM9DS1
7 = InvenSense MPU-9250
8 = STM L3GD20H + LSM303DLHC
9 = Bosch BMX055
10 = Bosch BNX055
-->
<param name="imu_type" value="7" />
<!--fusion_type:
0 = RTFUSION_TYPE_NULL: just a dummy to keep things happy if not needed
1 = RTFUSION_TYPE_KALMANSTATE4: kalman state is the quaternion pose
2 = RTFUSION_TYPE_RTQF: RT quaternion fusion
-->
<param name="fusion_type" value="2" />
<!-- mpu9250/gyro_accel_sample_rate: 5 - 1000 Hz -->
<param name="mpu9250/gyro_accel_sample_rate" value="80" />
<!-- mpu9250/compass_sample_rate: 1 - 100 Hz -->
<param name="mpu9250/compass_sample_rate" value="40" />
<!-- mpu9250/gyro_low_pass_filter:
0x11 - 8800Hz, 0.64mS delay
0x10 - 3600Hz, 0.11mS delay
0x00 - 250Hz, 0.97mS delay
0x01 - 184Hz, 2.9mS delay
0x02 - 92Hz, 3.9mS delay
0x03 - 41Hz, 5.9mS delay
0x04 - 20Hz, 9.9mS delay
0x05 - 10Hz, 17.85mS delay
0x06 - 5Hz, 33.48mS delay
-->
<param name="mpu9250/gyro_low_pass_filter" value="3" />
<!-- mpu9250/accel_low_pass_filter:
0x00 - 460Hz, 1.94mS delay
0x01 - 184Hz, 5.80mS delay
0x02 - 92Hz, 7.80mS delay
0x03 - 41Hz, 11.80mS delay
0x04 - 20Hz, 19.80mS delay
0x05 - 10Hz, 35.70mS delay
0x06 - 5Hz, 66.96mS delay
-->
<param name="mpu9250/accel_low_pass_filter" value="3" />
<!-- mpu9250/gyro_full_scale_range:
0 +/- 250 degress per second
8 +/- 500 degress per second
16 +/- 1000 degress per second
24 +/- 2000 degress per second
-->
<param name="mpu9250/gyro_full_scale_range" value="16" />
<!-- mpu9250/accel_full_scale_range:
0 +/- 2g
8 +/- 4g
16 +/- 8g
24 +/- 16g
-->
<param name="mpu9250/accel_full_scale_range" value="16" />
</node>
</launch>
the imu doesn't move, but the output is:
---
header:
seq: 2685
stamp:
secs: 1598377876
nsecs: 786975020
frame_id: "imu_link"
orientation:
x: 0.0196061972529
y: -0.100331619382
z: 0.19570158422
w: 0.975320518017
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: -0.000253986567259
y: -0.000782979652286
z: 0.000762287527323
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
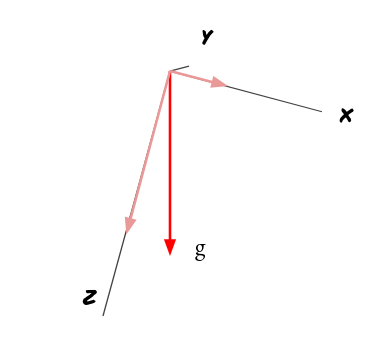
linear_acceleration:
x: 1.93930334473
y: 0.0191536132812
z: 9.28710823975
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
Why there is a linear_acceleration in X direction x=1.9 ?
add a comment