
USING ros2 offline (ROS_LOCALHOST_ONLY=1)

Hi,
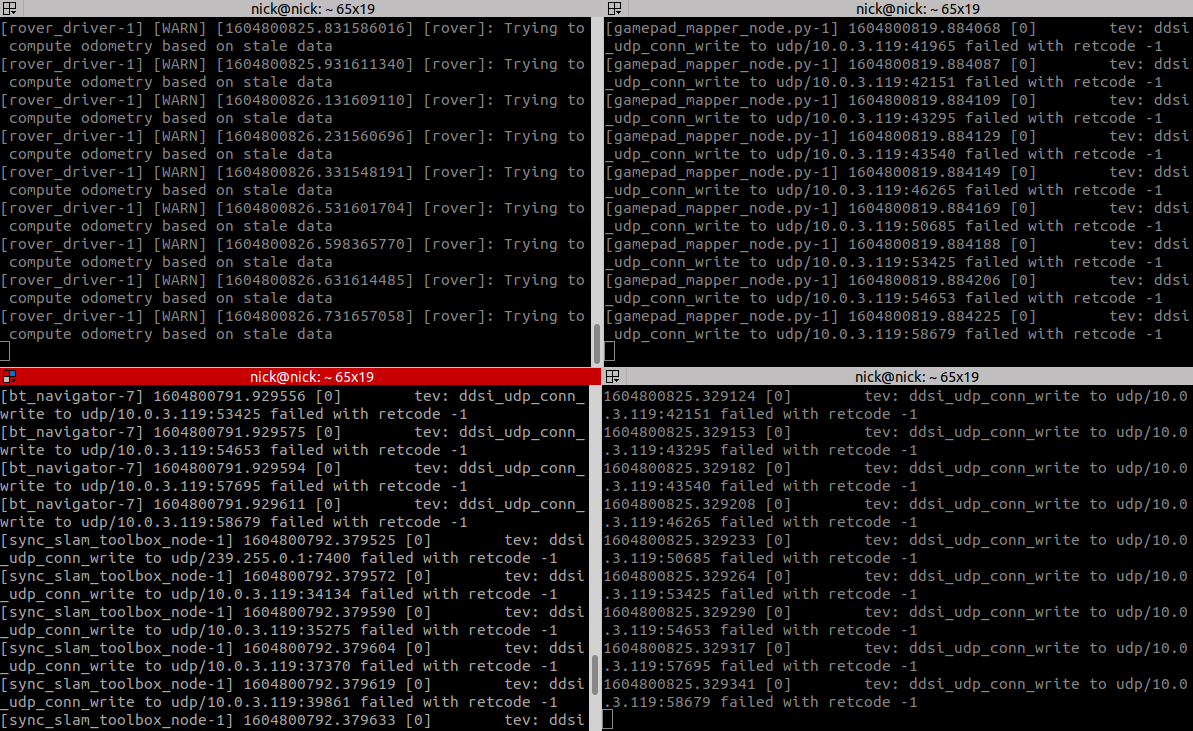
I'm trying to do a demo of mapping a large building with ROS2 Foxy, Slam Toolbox and a Rover Pro. I'm starting inside an office connected to wifi and then moving down a hallway where I lose wifi connection. If I have ROS_LOCALHOST_ONLY=0 then I have several nodes crash with error message tev: ddsi_udp_conn_write to udp/10.0.3.119:58679 failed with retcode: -1
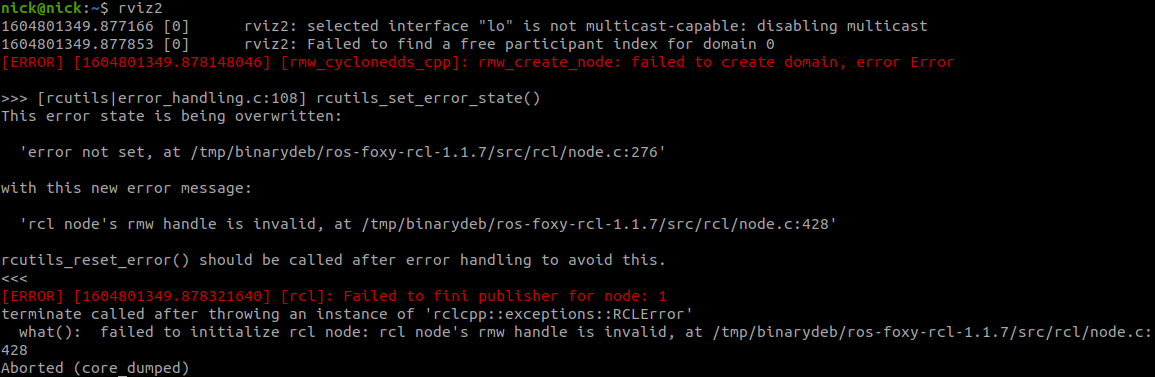
I then set ROS_LOCALHOST_ONLY=1 and am able to drive outside of wifi coverage but RVIZ2 fails to open with the error failed to find a free participant index for domain 0 so I am not able to see the map I'm creating.
Here is my ROS2 doctor --report
NETWORK CONFIGURATION ether
: 1c:69:7a:00:c8:04 device : eno1 flags : 4099<up,broadcast,multicast> mtu
: 1500 inet : 127.0.0.1 inet4 : ['127.0.0.1'] inet6 : ['::1'] netmask : 255.0.0.0 device
: lo flags : 73<up,loopback,running> mtu
: 65536 inet : 10.0.3.119 inet4 : ['10.0.3.119'] ether
: d0:c6:37:08:eb:ca inet6 : ['fe80::eef9:c514:2059:e7cb'] netmask : 255.255.248.0 device : wlp0s20f3 flags : 4163<up,broadcast,running,multicast> mtu : 1500 broadcast : 10.0.7.255 inet : 10.10.0.2 inet4 : ['10.10.0.2'] ether
: 9e:39:0f:d3:8b:c9 inet6 : ['fe80::9c39:fff:fed3:8bc9'] netmask
: 255.255.255.0 device : ztppirst4c flags : 4163<up,broadcast,running,multicast> mtu : 2800 broadcast : 10.10.0.255PACKAGE VERSIONS builtin_interfaces : required=1.0.0, local=1.0.0 nav2_planner
: required=0.4.5, local=0.4.3 action_tutorials_cpp
: required=0.9.3, local=0.9.3 nav2_gazebo_spawner
: required=0.4.5, local=0.4.3 rosidl_typesupport_introspection_cpp
: required=1.1.0, local=1.0.1 actionlib_msgs
: required=2.0.3, local=2.0.3 ament_uncrustify
: required=0.9.5, local=0.9.5 ament_cmake_core
: required=0.9.7, local=0.9.6 cartographer_ros
: required=1.0.9002, local=1.0.9001 sdl2_vendor
: required=2.4.1, local=2.4.1 pendulum_control
: required=0.9.3, local=0.9.3 resource_retriever
: required=2.3.3, local=2.3.2 nav_msgs : required=2.0.3, local=2.0.3launch_testing_ament_cmake
: required=0.10.3, local=0.10.2 rosbag2_compression
: required=0.3.5, local=0.3.4 rcl_action
: required=1.1.9, local=1.1.7 rosidl_generator_cpp
: required=1.1.0, local=1.0.1 ament_cmake_target_dependencies
: required=0.9.7, local=0.9.6 rclcpp_components
: required=2.2.0, local=2.1.0 nav2_costmap_2d
: required=0.4.5, local=0.4.3 ros2lifecycle
: required=0.9.7, local=0.9.7 lifecycle
: required=0.9.3, local=0.9.3 tinyxml_vendor
: required=0.8.0, local=0.8.0 gazebo_msgs
: required=3.5.0, local=3.5.0 cv_bridge
: required=2.2.1, local=2.2.1 ament_lint_auto
: required=0.9.5, local=0.9.5 nav2_map_server
: required=0.4.5, local=0.4.3 ament_cmake_flake8
: required=0.9.5, local=0.9.5 rqt_py_common ...

