
Can't see scan in rviz
I'm creating my robot model with a URDF file. I've added in the below snippet of code to model the laser scanner.
<link name="hokuyo_link">
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</collision>
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<box size="0.1 0.1 0.1"/>
</geometry>
</visual>
<inertial>
<mass value="1e-5" />
<origin xyz="0 0 0" rpy="0 0 0"/>
<inertia ixx="1e-6" ixy="0" ixz="0" iyy="1e-6" iyz="0" izz="1e-6" />
</inertial>
</link>
<joint name="hokuyo_joint" type="fixed">
<axis xyz="0 1 0" />
<origin xyz="0 0 0.2" rpy="0 0 0"/>
<parent link="base_link"/>
<child link="hokuyo_link"/>
</joint>
<gazebo reference="hokuyo_link">
<sensor type="gpu_ray" name="hokuyo">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>40</update_rate>
<ray>
<scan>
<horizontal>
<samples>720</samples>
<resolution>1</resolution>
<min_angle>-1.570796</min_angle>
<max_angle>1.570796</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>30.0</max>
<resolution>0.01</resolution>
</range>
</ray>
<plugin name="gpu_laser" filename="libgazebo_ros_gpu_laser.so">
<topicName>/scan</topicName>
<frameName>hokuyo_link</frameName>
</plugin>
</sensor>
</gazebo>
This should enable my model to start publishing the resulting laser data onto the scan topic. I run my model in a Gazebo world and the world includes obstacles. I see from rostopic echo /scan that it is publishing laser data on the scan topic. However, it always publishes data points at -inf of the scan, which is weird because I set the minimum range at <min>0.10</min>. I've driven my robot all around the obstacles but with no change to the laser data. Am I doing something wrong with the above sensor code?
Here is the output for the rostopic echo -n1 /scan command:
header:
seq: 0
stamp:
secs: 212
nsecs: 10000000
frame_id: "hokuyo_link"
angle_min: -1.57079994678
angle_max: 1.57079994678
angle_increment: 0.00436940183863
time_increment: 0.0
scan_time: 0.0
range_min: 0.10000000149
range_max: 30.0
ranges: [-inf, -inf.....]
intensities: [1.0, 1.0...]
Below is a picture of what I'm looking at in Gazebo and rviz. I'm putting my robot right in front of a wall. Rviz is able to subscribe to scan topic, and scan topic exists when I do rostopic list. For some reason, the walls don't seem to be recognized and the ranges in scan don't change.
Linux 5.3.0-62-generic #56 18.04.1-Ubuntu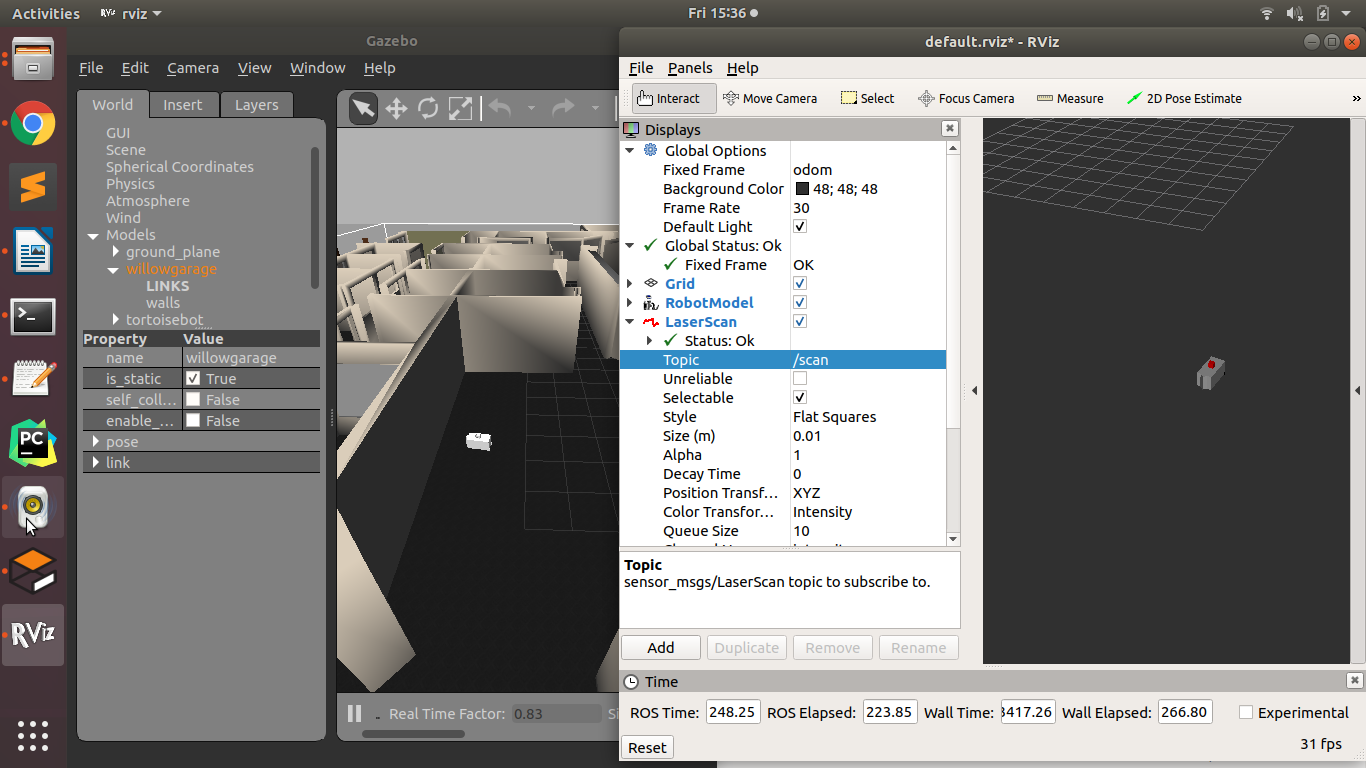


What does it look like in Gazebo? Set
<visualize>true</visualize>in your sensor configuration.I tried changing
visualizetotrueas you mentioned. Still had the same issue.You should be able to see the laser ray in Gazebo even if it hits its maximum range. Here's an example from the Gazebo Plugins in ROS tutorial. What happens if you reduce the size of the
collisionelement ofhokuyo_link? For example:I tried changing the
box sizeas suggested. It had no effect. I included the output torostopic echo -n1 /scanto my above post. Also, I realized I was looking atintensities: [1.0, 1.0...]and thought that was the ranges. I corrected my above post to reflect that the ranges are being published asranges: [-inf, -inf.....]I also started looking through the tutorial you provided. It says that changing
visualizetotrueshould display laser scan lines in Gazebo. As seen in the Gazebo picture, this isn't happening. I'm guessing that is because the scans are a length of-inf. I just can't figure out why, it is as if the laser scanner is turned off.You're getting messages, so it's definitely on. Please, try the non-GPU plugin (remove
gpu_everywhere in the sensor definition).That fixed it! What made you think that the GPU plugin was causing the issue?
I've come across similar issues before but had forgotten about it. Sometimes, the root cause is an incompatibility with the graphics card/driver; what do you have? I also seem to remember having to upgrade to a newer version of Gazebo to get a GPU plugin working correctly, but that may have been specific to a different lidar model. In any case, the choice is yours whether to further pursue the GPU version of this plugin or settle for the CPU version.