
Simulated quadrotor is slowly drifting on its own [closed]
Hello, I've noticed that on my install (fuerte from debs, quadrotor from svn -r 403), according to the "ground truth state", the quadrotor slowly drifts when not provided with a control input.
The onboard camera confirms this motion as well.
Is this something that others have observed, or can repeat?
roslaunch hector_quadrotor_demo outdoor_flight_gazebo.launch &
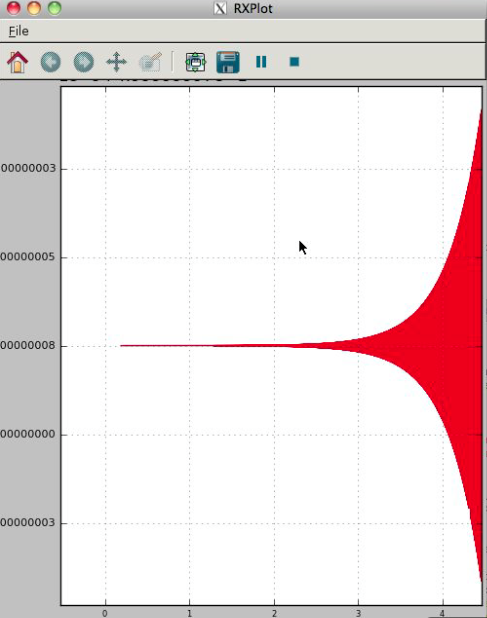
rostopic echo -p /ground_truth/state/pose/pose/position/z
To be clear, so far, publishing '[0.0,0.0,0.0]' '[0.0,0.0,0.0]' doesn't appear to change the outcome for me, but other non-zero control do. (still trying to clear this up)
The first seven seconds of the position data also have some interesting dynamics, which I assume are because the odom messages have not yet been published. If this is the case, is this an example of how numerical uncertainty grows in the physics engine?


Setting the linear.z attribute of the twist message to -.0049 causes neutral buoyancy (with a small bounded oscillation)
Still no answers, and none of the the xacro files, the world files, nor the launch files are providing any clues.