
Force raw8 for debayering

Hi,
I have a Basler camera that outputs bayer pattern images in format7_mode1 mode. However, when I set raw8 for the format7_color_coding parameter, then it fails to be set, and mono8 is used instead. Therefore, the image_proc node cannot debayer the images, because it thinks they are simply grayscale, instead of bayer, as they actually are.
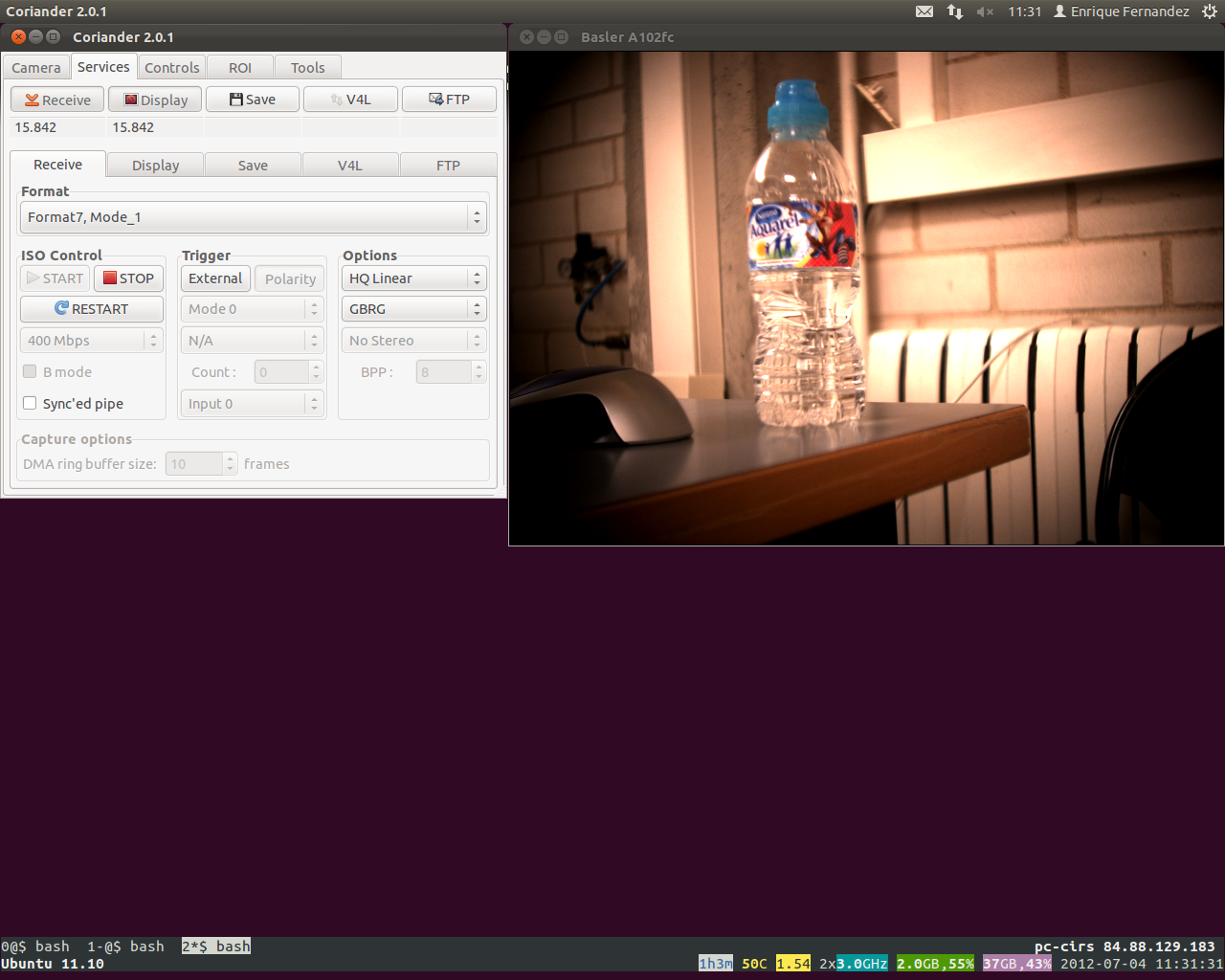
Everything works in coriander (see coriander_bayer.png).
The output of the camera1394 node is
[ INFO] [1341392664.941249990]: using default calibration URL
[ INFO] [1341392664.941737294]: camera calibration URL: file:///home/enrique/.ros/camera_info/camera.yaml
[ERROR] [1341392664.942107239]: Unable to open camera calibration file [/home/enrique/.ros/camera_info/camera.yaml]
[ WARN] [1341392664.942363881]: Camera calibration file /home/enrique/.ros/camera_info/camera.yaml not found.
[ INFO] [1341392665.615791969]: Found camera with GUID 305300013759c6
[ INFO] [1341392665.616241698]: camera model: Basler A102fc
[ INFO] [1341392665.621517490]: Format7 unit size: (2x2), position: (2x2)
[ INFO] [1341392665.621664656]: Format7 region size: (1388x1038), offset: (0, 0)
[ERROR] [1341392665.624025892]: Color coding raw8 not supported by this camera
[ INFO] [1341392665.636889941]: using default calibration URL
[ INFO] [1341392665.637584961]: camera calibration URL: file:///home/enrique/.ros/camera_info/00305300013759c6.yaml
[ERROR] [1341392665.638324312]: Unable to open camera calibration file [/home/enrique/.ros/camera_info/00305300013759c6.yaml]
[ WARN] [1341392665.639039116]: Camera calibration file /home/enrique/.ros/camera_info/00305300013759c6.yaml not found.
[ INFO] [1341392665.639805838]: [00305300013759c6] opened: format7_mode1, 15 fps, 400 Mb/s
[ INFO] [1341392665.640524806]: camera calibration URL: package://cameras_cirs/calibration/basler_a102fc/format7_mode1/00305300013759c6.yaml
The message
Color coding raw8 not supported by this camera
of the output, is generated in modes.cpp file.
IMHO I think the best way to solve this is to allow the image_proc node to debayer mono8 images, so cameras that call mono8 to what should be raw8 are supported.
How can I force to set the raw8 encoding, or just debayer the images? Thanks in advance.
Below you can see the launch and (parameters/config) yaml files I'm using to run the camera driver.
Enrique
basler_a102fc_format7_mode1.yaml # Example camera parameters (for Basler A102fc)
# Parameters (no lens required/used)
guid: 00305300013759c6 # (defaults to first camera on bus)
iso_speed: 400 # IEEE1394a
video_mode: format7_mode1 # 1388x1038 @ 15fps bayer pattern
frame_rate: 15 # max fps (Hz)
format7_color_coding: raw8 # for bayer (we can use others, even rgb8 directly)
# With raw8, we don't need to configure bayer pattern and method, actually we
# cannot change them
bayer_pattern: gbrg
#bayer_method: HQ
auto_brightness: 3 # Manual (3)
brightness: 0
# Is better to increase gain than shutter speed, becuase gain produce salt&pepper
# noise, while shutter speed produce motion blur, which is harder to deal with.
auto_gain: 3 # Manual (3)
gain: 512 # dB unavailable
# See comment above wrt to gain and shutter speed setting.
auto_shutter: 3 # Manual (3)
shutter: 356 # time (ms) unavailable; value for sunlight
auto_white_balance: 3 # Manual (3)
white_balance_BU: 112
white_balance_RV: 64
frame_id: basler_a102fc
camera_info_url: package://cameras_cirs/calibration/basler_a102fc/format7_mode1/${NAME}.yaml
basler_a102fc.launch
<launch>
<!-- Usage:
roslaunch cameras_cirs basler_a102fc.launch view:=true
-->
<!-- Arguments -->
<!-- Show video output (both RAW and rectified) -->
<arg name="view" default="false"/>
<!-- Camera params (config) -->
<arg name="params ...

{kind=link}
If it works with coriander, then this is a bug in camera1394. Otherwise, it's a problem with the camera or the IEEE 1394 bus interface. Many cameras have flaky Format7 implementations.