
How do you make an /odom node for a physical robot in ros2?(rviz not showing updated /base_link)
EDIT: deleting previous contents of post because ive made some progress on this and my problems are more specific now.
EDIT2: Odom publishes! rviz doesn't show updates though. I fixed my previous problem and put its answer in my response to 404robotnotfound, basically, createQuaternionMsgFromYaw() doesnt exist in ros2, but getting a rotational quaternion from SciPy from_eulur() does.
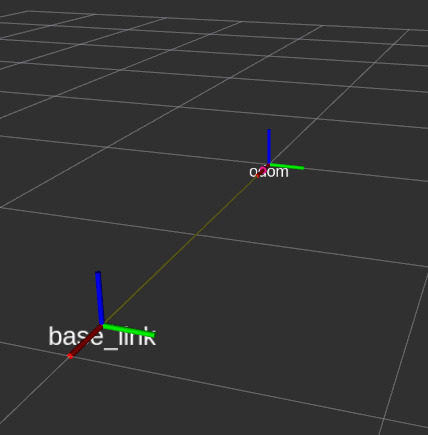
EDIT3: rviz now displays the odometry node! I just needed to set /odom as the the global fixed_frame and now /base_link is gradually moving away from /odom. I'll finish tying navigation2 to the /odom movement and post that and previous problems in the answer.
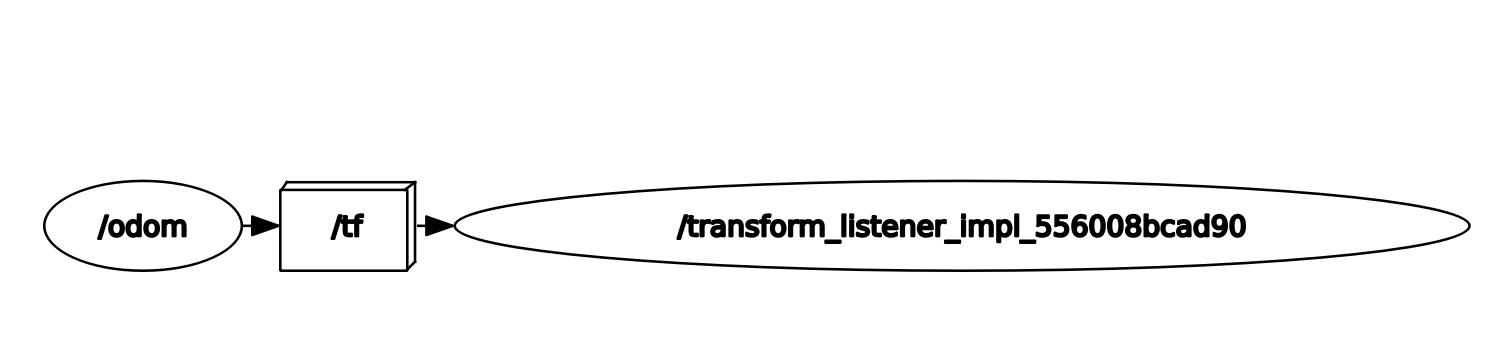
I'm trying to ROS2ify the ros1 odom node here but the new problem i've run into is that rviz2 isn't showing the updated /base_link that its subscribed to via /odom.
I've confirmed /base_link is updating with "ros2 topic echo odom", so I think its something with how I'm publishing my nodes?


I understand your problem is being solved, but it would probably be good to leave your questions you had before the edits up there instead of removing them, so anyone who has the same problem can better understand what you were asking and hopefully benefit from the answers as well.
This problem is a mix of multiple problems and having the old problems that have been solved in the question would be visual clutter, I'm thinking of posting an answer to the main question and addressing each of the problems I ran into in process of answering the main question in the answer.
@rydb: @404RobotNotFound is actually correct: it would be better to not delete contents from questions, as it makes the chronology of the Q&A really difficult to figure out.
If you'd like the most "recent state of affairs" to be the one that's the most visible, place later edits at the top. So instead of
original - edit1 - edit2 - ..., doedit2 - edit1 - original.