
Autoware Open Planner global path and local path replan issue
Hi all,
I am using the Autoware 1.13 Release + Open Planner. I have some questions regarding to the replanning mechanism of global path and local path. When I initialize the ego-vehicle for the first time, the global path and local path can be successfully planned and tracked. However, when the ego-vehicle is reinitialized, it seems the global path did not replanned (I expect it to replan from the new position to the goal). The local path seems replanned but the selected path (in my understanding are those green circles shown in the RViz) are not correctly selected from the newly planned local path but from the previously local paths. My questions can be better illustrated in the video. Please let me know if I did not make myself clear.
Another two minor issues:
- Some red dots (the potential conflicts) with other vehicles did not disappear. I also find this situation for some of the green circles (the selected path).
- Some local paths rollouts did not disappear even when the ego-vehicle has already passed the position.
In the simulation, I find that the ego-vehicle behavior state is not GOAL_STATE but still FORWARD_STATE when it reached the destination (although there is still a small distance but the ego-vehicle did not move so I assume it has reached it?) as shown below:
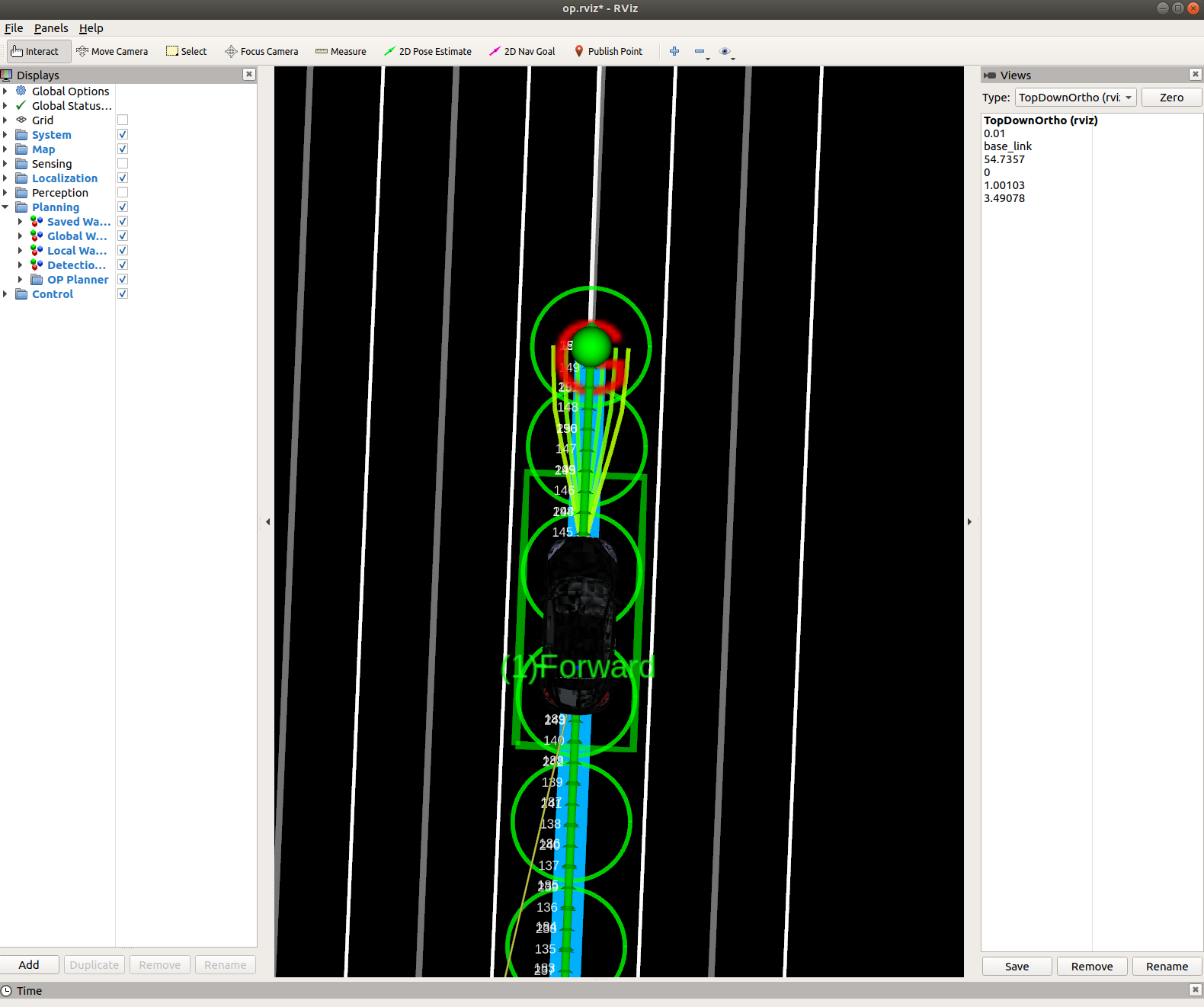
Any comments and suggestions are appreciated. Thanks!

Hi @Hatem, could you please take a look on this? Thanks :)!