
Using robot with closed loop structure in Moveit
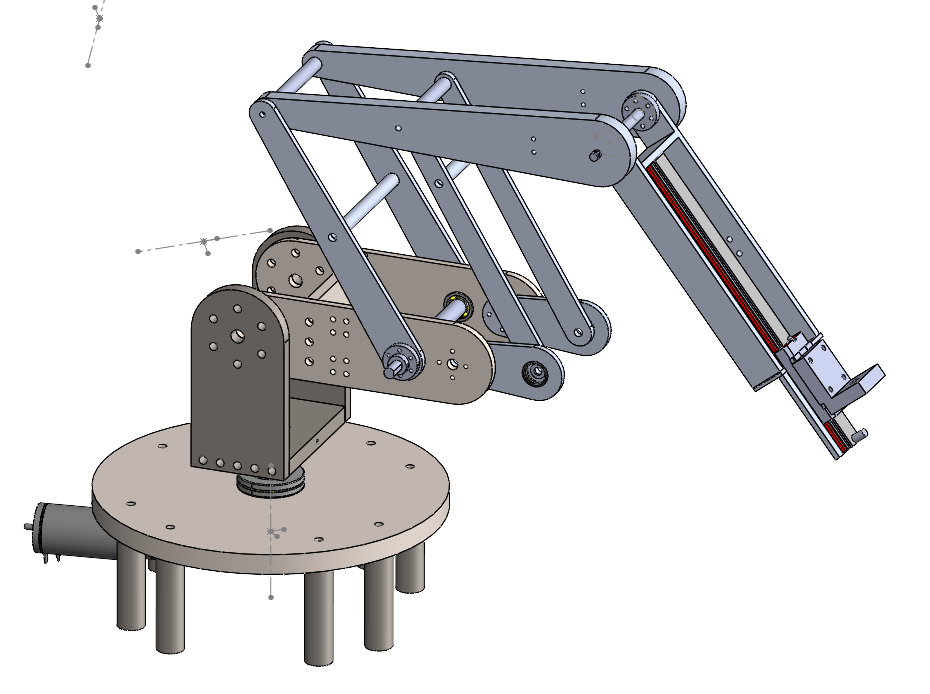
How can I define the following robot in URDF to use it with move it
Image :
Update:
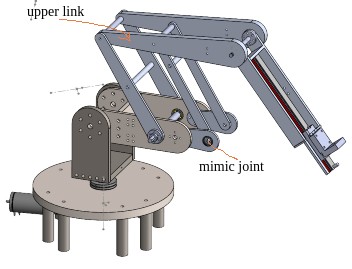
I might not phrase my question properly, my apologies. I know how to export from Solidworks to URDF. My issue is that Moveit only accepts tree type of structure and do not accept closed structure due to the URDF limitation. If I set the link in the image to mimic, what should I do to the upper link to make it move correctly, i.e the motion should be according to the four-bar linkage, where the upper-link motion will be close to linear motion with slight rotation.


I have uploaded your image, I have given you enough karma that you can now be able to upload an image by yourself.
Thanks @Ranjit
@robotUrdf In the future, please update your question to provide more information instead of using an answer