
costmaps being updated with data from two sensors of different heights

Hi
I have a robot with an RPLidar sensor on top and would like to add an ultrasonic sensor to identify and avoid obstacles that are below the LIDAR line. It is possible?
My robot:
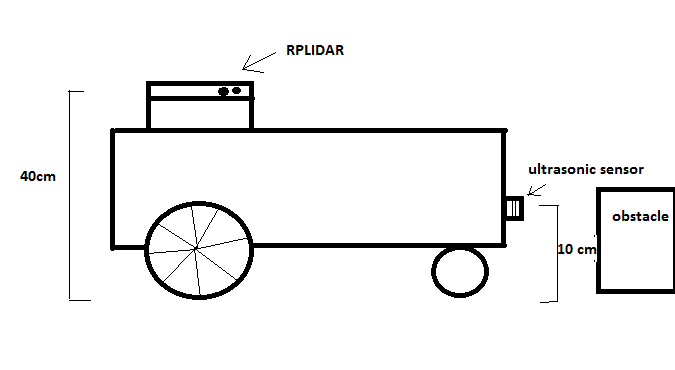
Let's say the ultrasonic sensor publishes distance values less than one meter in the topic /ultrasonic_readings and the ultrasonic sensor link is called ultrasonic_link . I believe the ultrasonic sensor readings should be put into the cost maps (global and local), but I'm not sure how to do this. Has anyone done something like that?
costmap_common_params.yaml:
obstacle_range: 2.5
raytrace_range: 3.0
footprint: [[-0.045,-0.10],[-0.045,0.10],[0.17,0.10],[0.17,-0.10]]
observation_sources: scan
scan: {sensor_frame: rplidar_link, observation_persistence: 0.0, max_obstacle_height: 0.4, min_obstacle_height: 0.0, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
inflation_layer:
inflation_radius: 0.3
cost_scaling_factor: 3.0
local_costmap_params.yaml:
local_costmap:
global_frame: /odom
robot_base_frame: /base_footprint
update_frequency: 7.0
publish_frequency: 7.0
static_map: false
rolling_window: true
width: 2.0
height: 2.0
resolution: 0.02
transform_tolerance: 0.5
global_costmap_params.yaml:
global_costmap:
global_frame: /map
robot_base_frame: /base_footprint
transform_tolerance: 0.5
update_frequency: 7.0
publish_frequency: 7.0
static_map: true
rolling_window: false
thanks
add a comment

