Assuming you're using the robot_state_publisher package to publish your TFs, it also publishes the contents of the URDF file of the robot you're using to a topic robot_description.
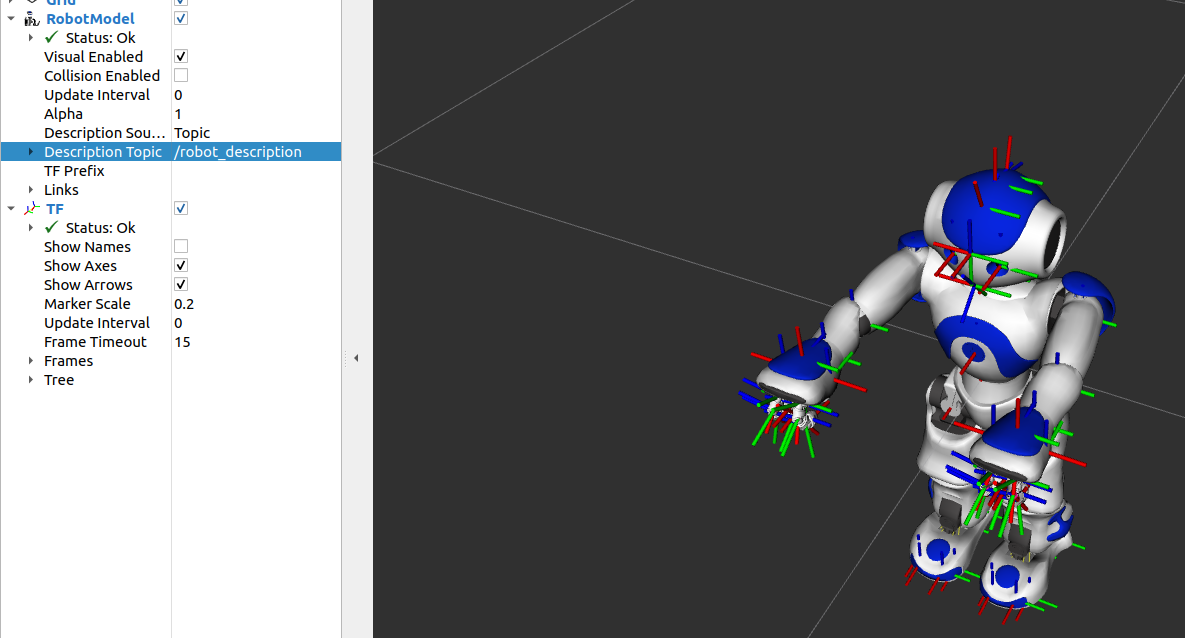
In RViz, in the Displays panel, open up RobotModel, and change Description Topic to /robot_description. (This makes the RobotModel visualization in RViz listen to the model of the robot from the robot_state_publisher).
Also, make sure Visual Enabled is ticked under Robot Model.
You should be able to see your own robot, like below (or whatever robot you're using)