
How to get the trajectory data generated by MotionPlanning when using the MotionPlanning Rviz plugin?

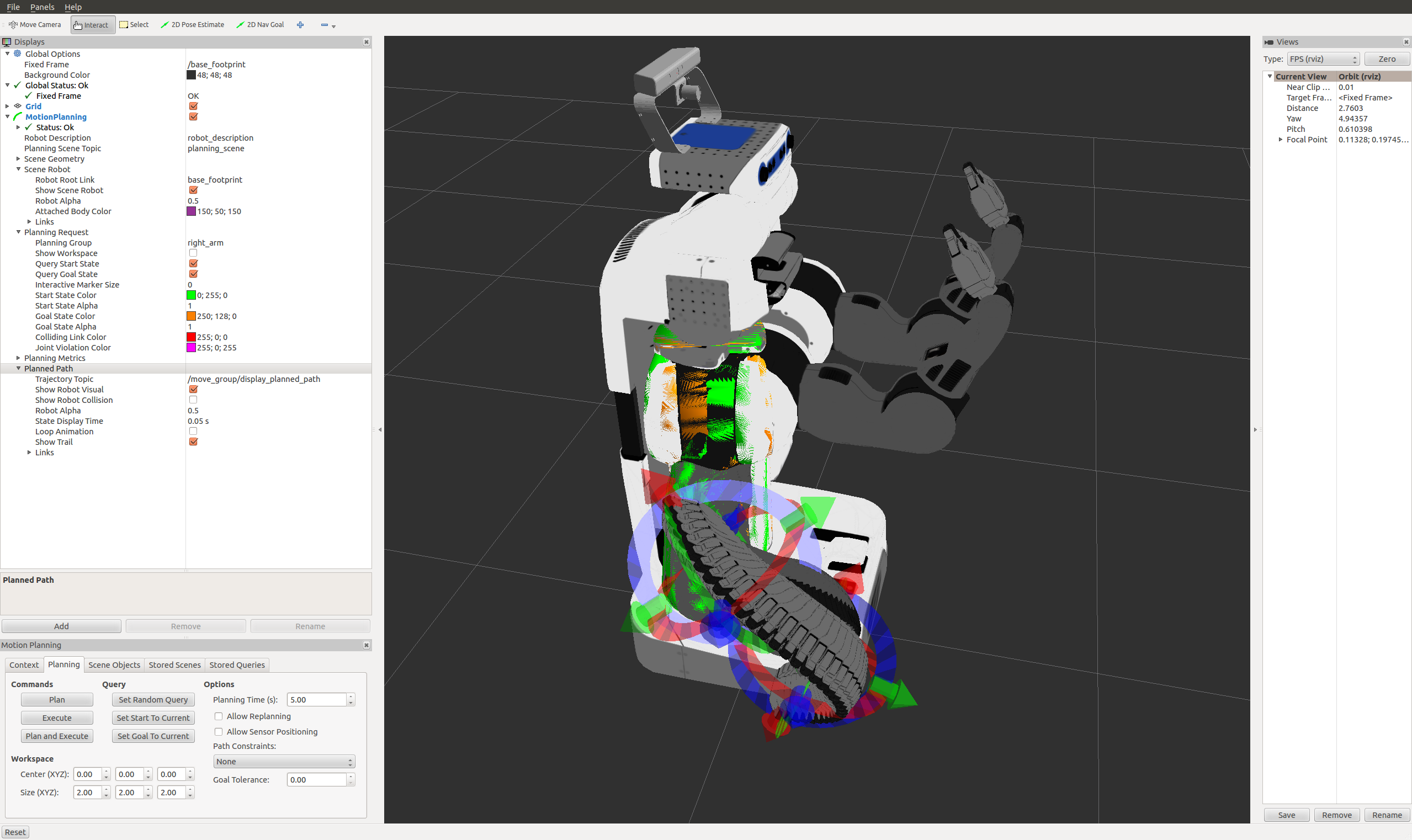
As the picture shows, in the Planning tab (at the bottom), once I press the Plan button, and then I am able to see a visualization of the arm moving and a trail. I wanna know how can I get the trajectory data (described in moveit_msgs::RobotTrajectory) of this planning? Does it need to subscribe to a specific topic to get it? Any advice would be greatly appreciated.
add a comment
