
For frame [velodyne]: Frame [velodyne] does not exist
Hi, I was trying to run the demo at the autoware.ai github.
After I applied the my_map.launch, I still cannot see the pointcloud map in RVIZ.
The RVIZ is shown as follows:
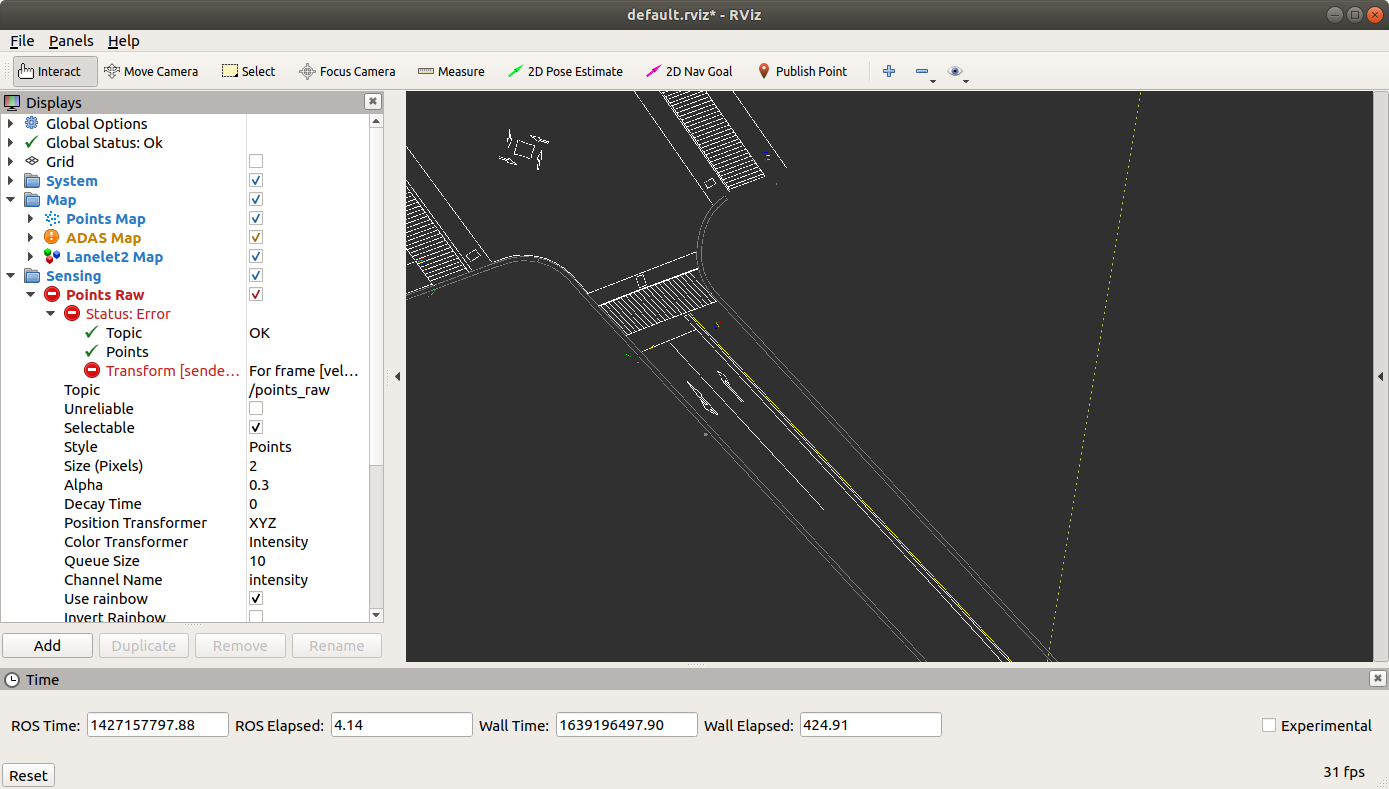
The points_raw had the error: For frame [velodyne]: Frame [velodyne] does not exist
I'm using ros melodic and autoware 1.14.
add a comment

