Hi @jdastoor3
Apologies for suggesting pygazebo, I was able to make it work but there are many bugs.
Instead, I went over again and I think using Gazebo Services is the way to go:
After you launch gazebo using roslaunch gazebo_ros empty_world.launch
in another terminal you can check services available: rosservice list
If you look into: rosservice info /gazebo/set_light_properties you will get:
Node: /gazebo
URI: rosrpc://127....
Type: gazebo_msgs/SetLightProperties
Args: light_name cast_shadows diffuse specular attenuation_constant attenuation_linear attenuation_quadratic direction pose
And if you look further into this by rossrv show gazebo_msgs/SetLightProperties
string light_name
bool cast_shadows
std_msgs/ColorRGBA diffuse
float32 r
float32 g
float32 b
float32 a
std_msgs/ColorRGBA specular
float32 r
float32 g
float32 b
float32 a
float64 attenuation_constant
float64 attenuation_linear
float64 attenuation_quadratic
geometry_msgs/Vector3 direction
float64 x
float64 y
float64 z
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
---
bool success
string status_message
To access with Python, I wrote this script:
#!/usr/bin/env python
import time
import rospy
from gazebo_msgs.srv import SetPhysicsProperties, SetPhysicsPropertiesRequest
from gazebo_msgs.srv import SetLightProperties, SetLightPropertiesRequest
from geometry_msgs.msg import Pose, Quaternion
from geometry_msgs.msg import Vector3
from std_msgs.msg import Float64
from std_msgs.msg import ColorRGBA
from std_srvs.srv import Empty
service_name = '/gazebo/set_light_properties'
rospy.loginfo("Waiting for service " + str(service_name))
rospy.wait_for_service(service_name)
rospy.loginfo("Service Found "+str(service_name))
set_light = rospy.ServiceProxy(service_name, SetLightProperties)
light_name = 'sun'
cast_shadows = True
difuse = ColorRGBA()
difuse.r = float(204/255)
difuse.g = float(204/255)
difuse.b = float(204/255)
difuse.a = float(255/255)
specular = ColorRGBA()
specular.r = float(51/255)
specular.g = float(51/255)
specular.b = float(51/255)
specular.a = float(255/255)
attenuation_constant = 0.90
attenuation_linear = 0.01
attenuation_qudratic = 0.00
direction = Vector3()
direction.x = -0.483368
direction.y = 0.096674
direction.z = -0.870063
pose = Pose()
pose.position.x = 0.00
pose.position.y = 0.00
pose.position.z = 10.00
pose.orientation.x = 0.00
pose.orientation.y = 0.00
pose.orientation.z = 0.00
pose.orientation.w = 1.00
response = set_light(light_name, cast_shadows, difuse, specular, attenuation_constant, attenuation_linear, attenuation_qudratic, direction, pose)
print(response)
I am using the default settings that you can see in Gazebo:
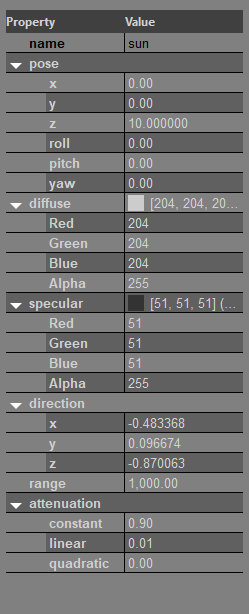
Hope this helps you, then you can change light conditions or other properties to set fog.




Have you looked into pygazebo?
It’s in Python2 documentation link: https://buildmedia.readthedocs.org/me...
But there is py3gazebo fork: https://github.com/wil3/py3gazebo
Or direct with Gazebo API:
http://osrf-distributions.s3.amazonaw...
I tried doing that just now, and I get an error saying "cannot import name 'connect' from partially initialized module 'pygazebo' (most likely due to a circular import)". I pip installed pygazebo.
Just a watch out if you install via
pipis Python2 and you need a complimentary libraryCheck the example in: https://github.com/jpieper/pygazebo
I followed the steps at the bottom of py3gazebo to convert the python2 version to the python3 version, yet that still gives me the same error.
Update: I managed to get a bit further, but now I get another error in pygazebo.py: line 251,
I used it back in Kinetic, there a few errors. I just tried it as well and fixing them