
plan moveL moveP

hi
i have multiple waypoints (std::vector<geometry_msgs::Pose> waypoints)
i can plan these waypoints using computeCartesianPath:
computeCartesianPath( waypoints, eef_step, jump_threshold, trajectory, true );
i think "computeCartesianPath" equals moveL function.
how can i plan moveP

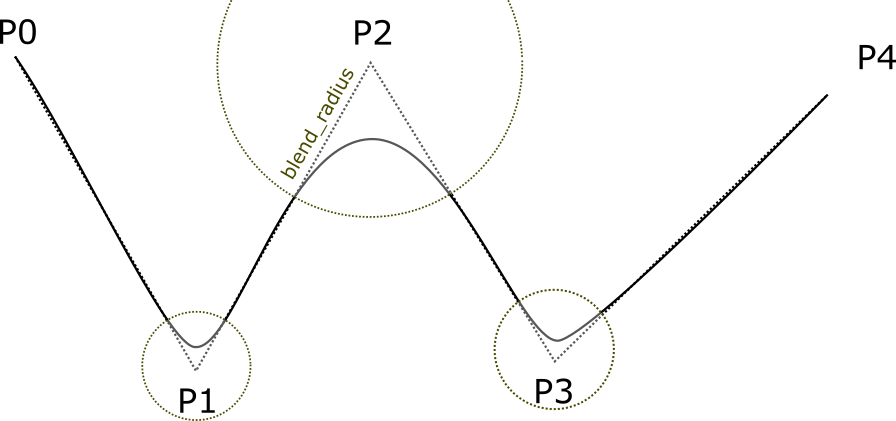

You'll want to explain (for others) what "moveP" actually does. I believe you're referring to a specific motion type on Universal Robots, but it's not universal terminology. So without describing what you're trying to achieve, it's going to be difficult to help you.