
robot_localization angles diverge when robot is in high pitch

Hi
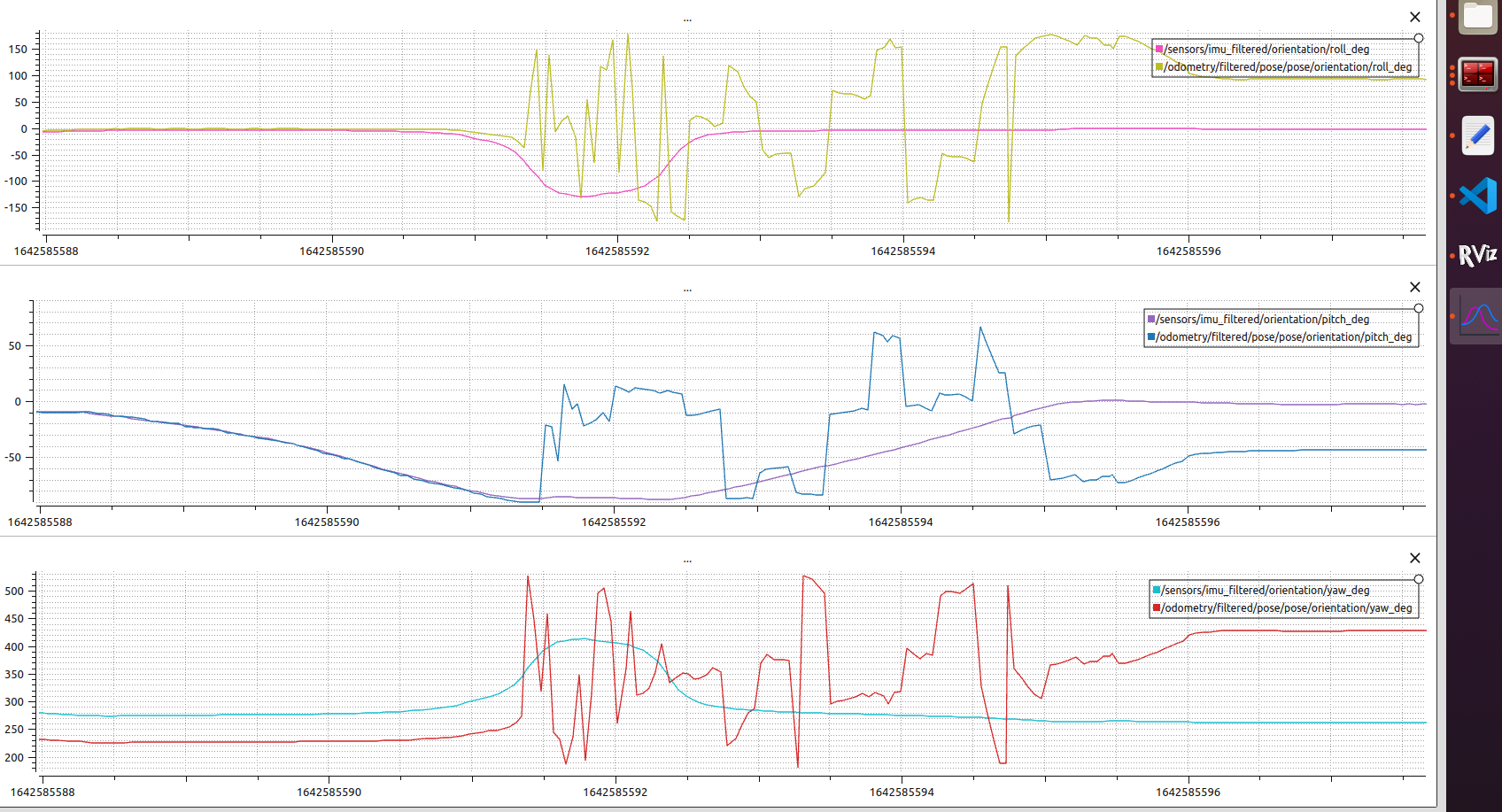
I'm using robot localization package for mapping which is working well until I reach high pitch then orientation of filter goes bad.
input to robot_localization is:
1) imu filtered from madgwick filter
2) motor data - wheel movement
3) altitude sensor
When robot reaches high pitch (80 deg) madgwick filter stays good but output from localization goes bad.
can I make localization take madgwick filter output with out changing it?
thanks
attached screenshot of two filters
C:\fakepath\Screenshot from 2022-01-19 12-04-31.png

{kind=link}
@Nachum, please add the picture. Only link is showing.
Thank you for updating.
So this is a robot with wheels, and it moves on the ground? When you said
altitude sensor, I assumed this was a drone. Why is altitude (height above sea-level) relevant?at high pitch there is a lot of slipping so wheel data isn't enough.
Please edit your description and copy/paste your robot_localization config file, then format it as code using the 101010 button. It's OK if it is long. FYI, there are a very large number of existing questions on this site about how to configure IMU+wheel_encoder inputs to this package, so you might get an answer faster by searching for them.
You edit using the "edit" button at the end of the description.
You need to simplify the system to debug where the problems are. You could configure robot_localization with only one input (IMU or wheel_encoder or altimeter) to see if the output looks reasonable.