Noisy points from point cloud causes Moveit! to fail
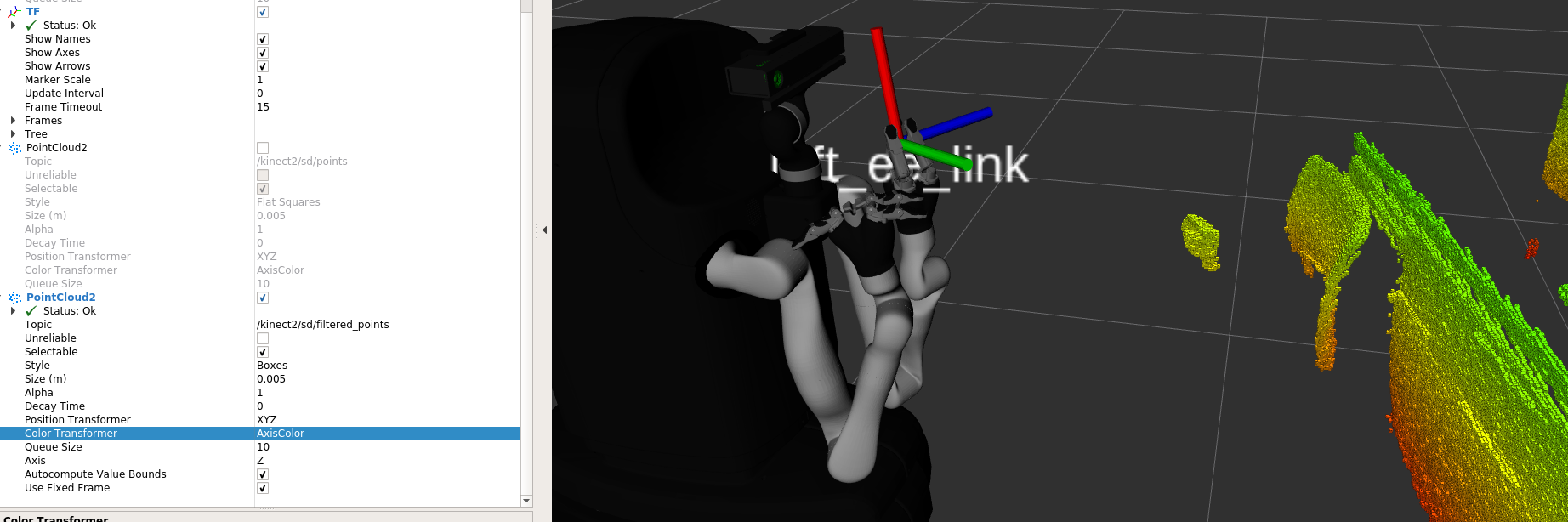
As shown in the screenshot below, some of the points (green) from the Kinect2 camera point cloud (kinect2/sd/points) are really close to the robot, due to sensor noise.
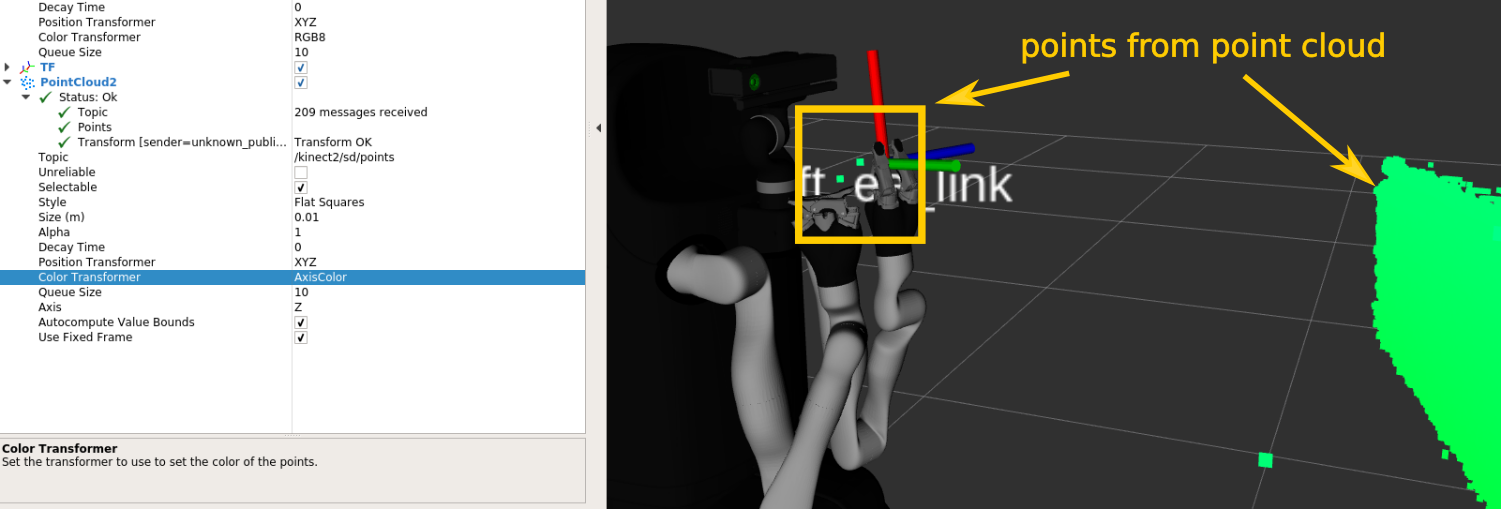
These points overlap with the gripper, and causes Moveit! to keep output the following message:
Motion plan was found but it seems to be too costly and looking around did not help.
and the plan was in state ABORTED.
When I turn off the OctoMap layer for Moveit!, the arm can execute the motion plan smoothly.
How can I either remove these noisy points or tell Moveit! to not worry about these points?
add a comment