
navigation with rviz won't move robot with 2D pose estimate using zed2
Good day, I am attempting the basic navigation example here.
I am trying to learn how to use the navigation stack so accuracy is of no importance right now.
The difference between the example and my setup is that I am only proving a /scan message to the amcl from the zed2 stereo camera, no pointcloud data (by running a pointcloud_to_laserscan node to convert the PointCloud data to laserscan). I also provided a static map using a map server.
I did not set up any tf myself because I saw that the zed's ROS code would handle all this and when I check the tree in rqt it seems to match with the example. (for now I don't mind if the camera's center and robot's center is the same as I would just like to get this up and running)
See my tf tree --->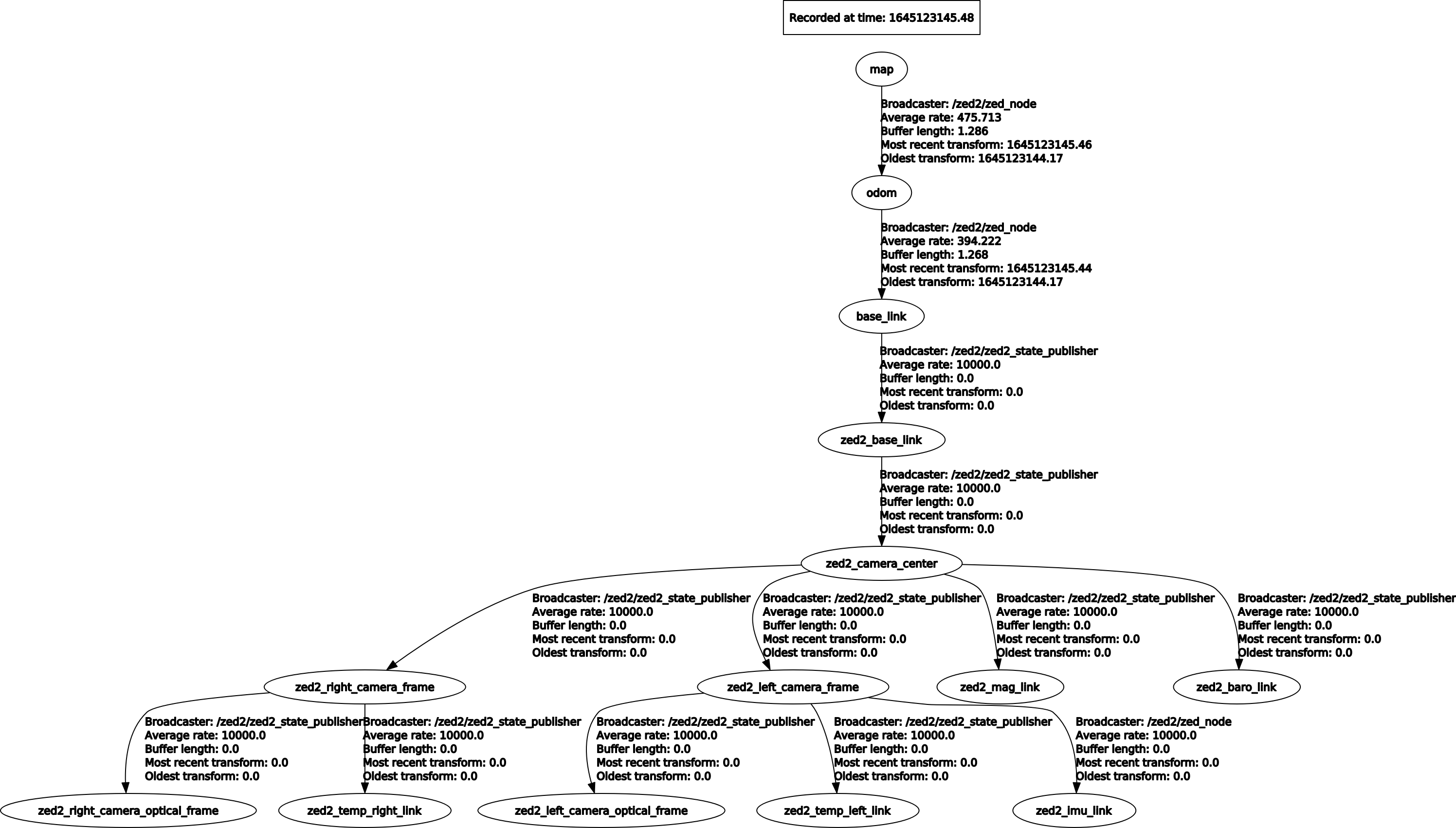
What I would like to do I get the robot to navigate around the static map I've provided.
The problem occurs when I open rviz and try to change the initialpose of my robot using the 2D Pose Estimate button. The tf tree for odom changes location but the robot does not move. Its base link remains in the original position but for a split second it can be seen jumping to a random location then back to the original position.
Here is the terminal output warning I get from rviz:
[ WARN] [1645126549.371862224]: The origin for the sensor at (-0.04, 0.31) is out of map bounds. So, the costmap cannot raytrace for it.
Additional information and code:
ROS version: melodic
system: Ubuntu 18.04
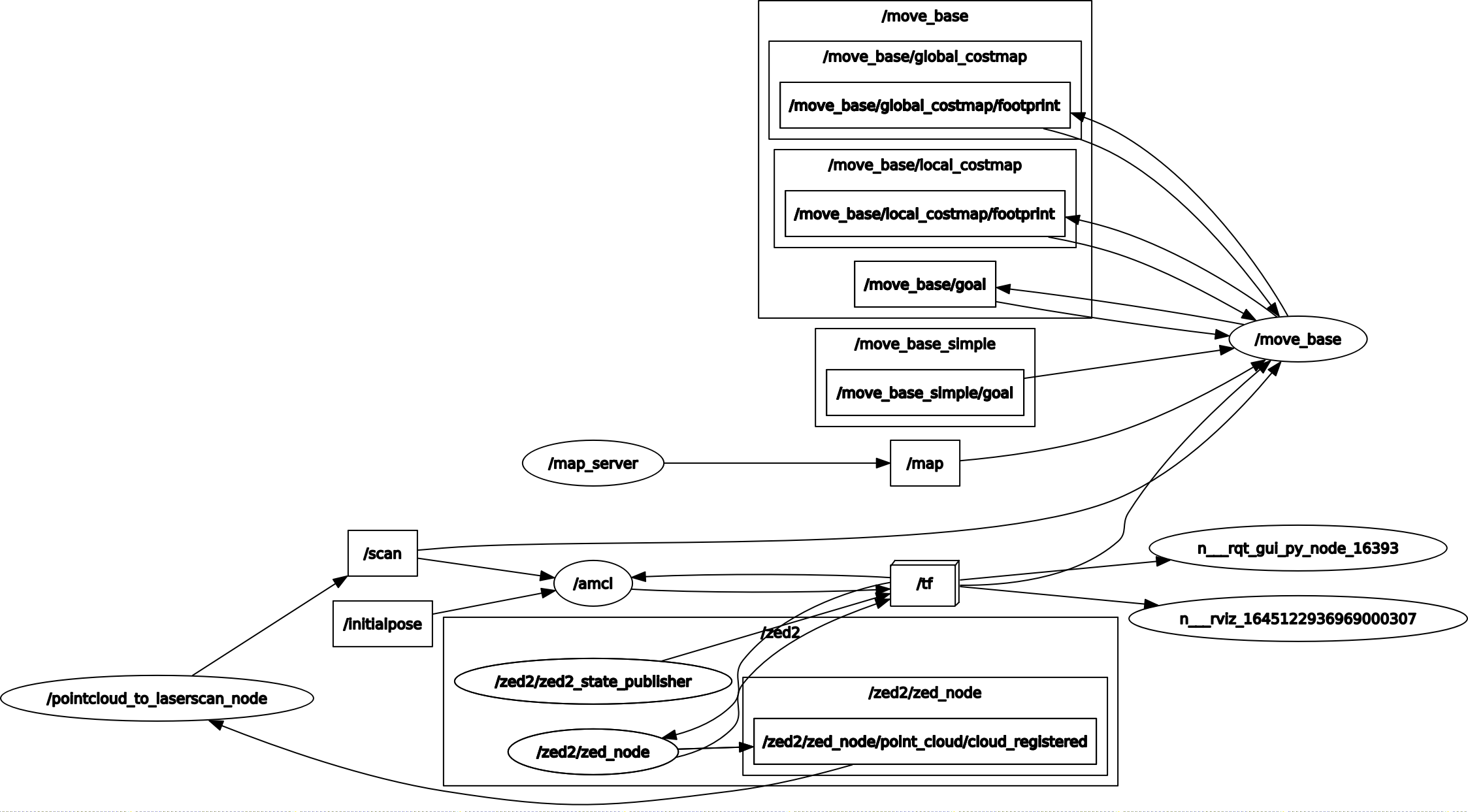
rosnode graph--->
move_base.launch:
<launch>
<master auto="start"/>
<!-- Run the map server -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find sentry_map_provider)/willow-2010-02-18-0.10.pgm 0.100000"/>
<!--- Run AMCL -->
<include file="$(find amcl)/examples/amcl_diff.launch" />
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find sentry_2dnav)/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find sentry_2dnav)/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find sentry_2dnav)/local_costmap_params.yaml" command="load" />
<rosparam file="$(find sentry_2dnav)/global_costmap_params.yaml" command="load" />
<rosparam file="$(find sentry_2dnav)/base_local_planner_params.yaml" command="load" />
</node>
</launch>
base_local_planner_params.yaml:
TrajectoryPlannerROS:
max_vel_x: 0.45
min_vel_x: 0.1
max_vel_theta: 1.0
min_in_place_vel_theta: 0.4
acc_lim_theta: 3.2
acc_lim_x: 2.5
acc_lim_y: 2.5
holonomic_robot: false
costman_common_params.yaml:
obstacle_range: 0.5
raytrace_range: 3.0
footprint: [[-0.25,-0.5],[-0.25,0.5],[0.25,0.5],[0.25,-0.5]]
inflation_radius: 0.55
observation_sources: laser_scan_sensor
laser_scan_sensor: {sensor_frame: zed2_base_link, data_type: LaserScan, topic: /scan, marking: true, clearing: true}
global_costmap_params.yaml:
global_costmap:
global_frame: map
robot_base_frame: base_link
update_frequency: 5.0
static_map: true
local_costmap_params.yaml:
local_costmap:
global_frame: odom
robot_base_frame: base_link
update_frequency: 5.0
publish_frequency: 2.0
static_map: false
rolling_window: true
width: 6.0
height: 6.0
resolution: 0.05

