
fanuc CRX 10 ial links and joints are not aligned
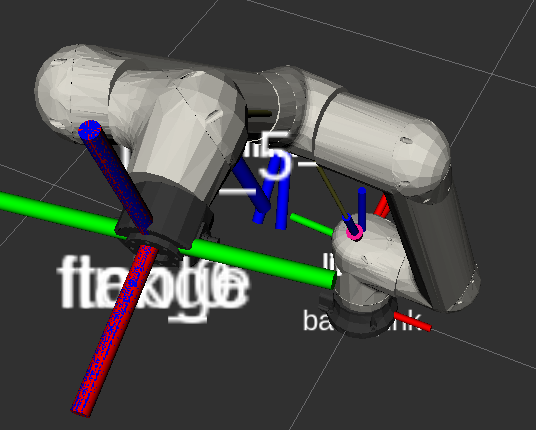
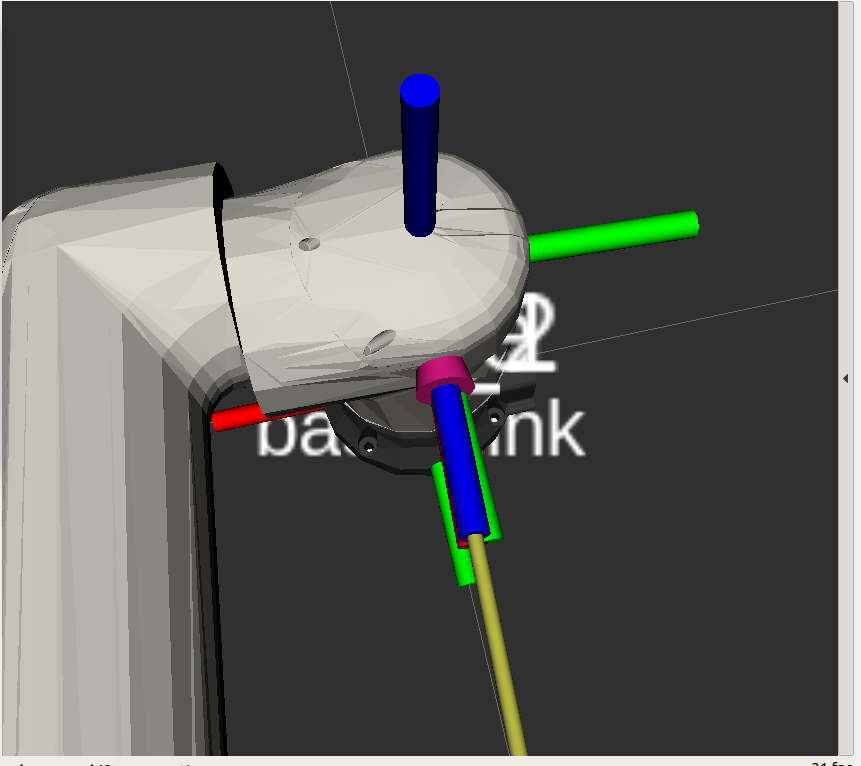
Working on creating a Moveit package for the CRX10ial I was able to create one using stl files for the robot provided by my company and code from ROS Fanuc experimental (this branch: https://github.com/WILDER-SYSTEMS-LLC...) when loading the files the links and joints are not aligned perfectly, I'm new to ros and would like to know where the issue exactly you can see below pictures of he output:
https://drive.google.com/file/d/1QK2V...
https://drive.google.com/file/d/1dAKV...
Edit: Thank you, and sorry for the trouble I already know about I already knew about the already existing update, since I will eventually be creating ros programs in the future I thought I could use this opportunity for training and get more familiar with the process. When i start up the simulation the links are in the correct position but when I move the joints it gets disjointed probably because they move from a different center from the rotation center of the joint.

I don't know what happened with the meshes you've converted yourself, but we just merged ros-industrial/fanuc_experimental#67, so you should be able to use that instead.
Additionally: please attach the screenshots to your post here. I've given you sufficient karma.