@Asad775889 This is what I get when I launch bring up and teleop and rostopic list
/cmd_vel_mux/input/teleop
/diagnostics
/diagnostics_agg
/diagnostics_toplevel_state
/joint_states
/laptop_charge
/rosout
/rosout_agg
/tf
/tf_static
I rostopic hz /cmd_vel_mux/input/teleop
turtlebot@CPR-TBT-1415:~$ rostopic hz /cmd_vel_mux/input/teleop
subscribed to [/cmd_vel_mux/input/teleop]
average rate: 9.935
min: 0.101s max: 0.101s std dev: 0.00006s window: 9
average rate: 9.933
min: 0.100s max: 0.101s std dev: 0.00016s window: 19
average rate: 9.934
min: 0.100s max: 0.101s std dev: 0.00017s window: 29
average rate: 9.938
In the teleop terminal when I input speed commands from keyboard, I get results, the robot doesn't move but I get velocities.
Control Your Turtlebot!
---------------------------
Moving around:
u i o
j k l
m , .
q/z : increase/decrease max speeds by 10%
w/x : increase/decrease only linear speed by 10%
e/c : increase/decrease only angular speed by 10%
space key, k : force stop
anything else : stop smoothly
CTRL-C to quit
currently: speed 0.502833998218 turn 2.85311670611
currently: speed 0.55311739804 turn 2.85311670611
currently: speed 0.608429137844 turn 2.85311670611
currently: speed 0.669272051629 turn 2.85311670611
currently: speed 0.736199256791 turn 2.85311670611
currently: speed 0.809819182471 turn 2.85311670611
currently: speed 0.890801100718 turn 2.85311670611
This is my rqt_graph 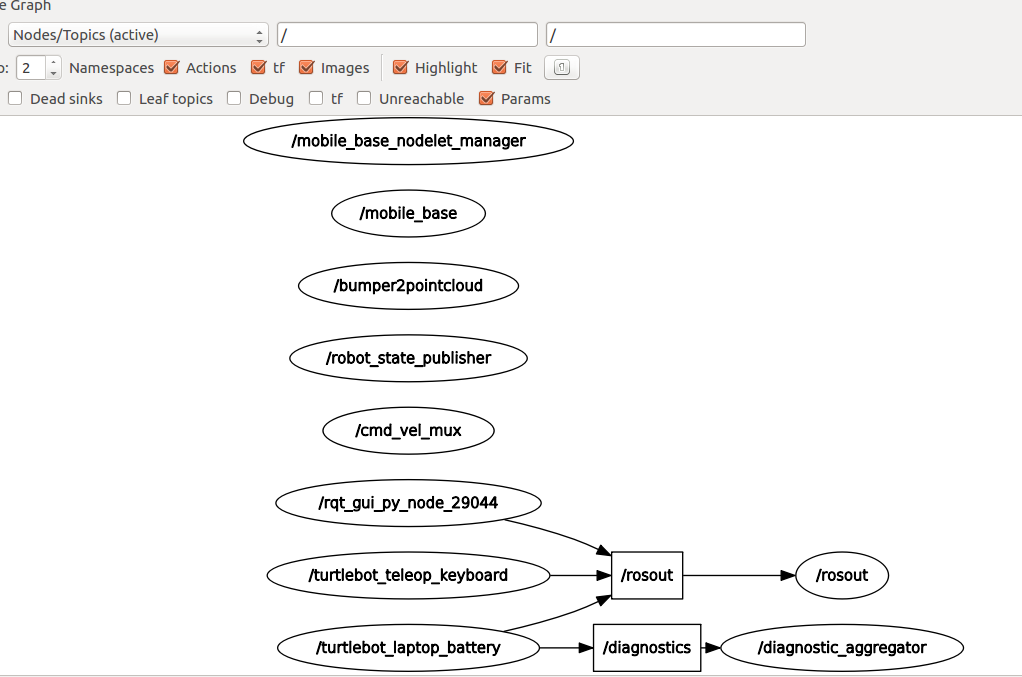 (http://)
(http://)

