
[ROS2] How does Rviz calculate ETA and how to access from code?
As the title says. How do I access the information that publishes to ETA in Rviz2?
add a comment
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
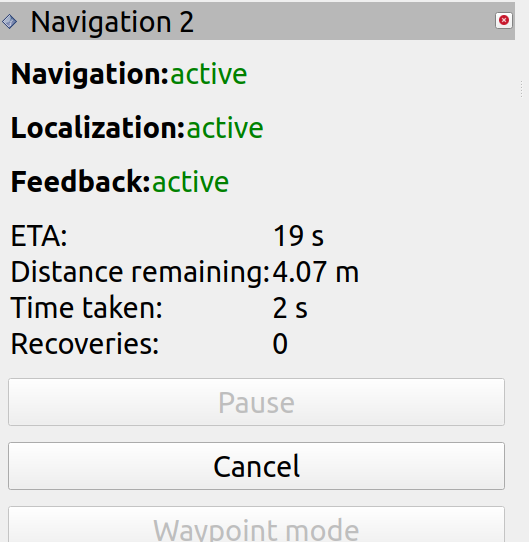
RViz2 sends the goal to the action server of Nav2. Nav2 uses the feedback function of the action server to give the ETA (among other things).
The easiest way I know to get access is to write your own action client that also sends the goal to Nav2. That way your node will be the one to receive the feedback messages.
ETA: Actually, you can also simply subscribe to /navigate_to_pose/_action/feedback you can also use ros2 topic echo /navigate_to_pose/_action/feedback to check.
Asked: 2022-05-02 08:40:28 -0600
Seen: 200 times
Last updated: May 02 '22
How to visualize surface normals as Marker::Arrow for each point in rviz?
Corrected Odometry from GMapping / Karto?
Visualizing continuous and revolute joint types in rviz
How to add Kinect sensor input to a URDF model?
Has there been progress for URDF transform jitter in RVIZ?
Starting rviz, failed to initialize ogre, cannot find RenderSystem_GL.so
rviz installation issues on 64bit snow-leopard using ROS Diamondback
pioneer 3dx simulation using rviz and stage
How can I visualize covariance data using ROS tools?
std_msgs/ColorRGBA[].displaying different color for each point
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
