
Customize the Local cost map
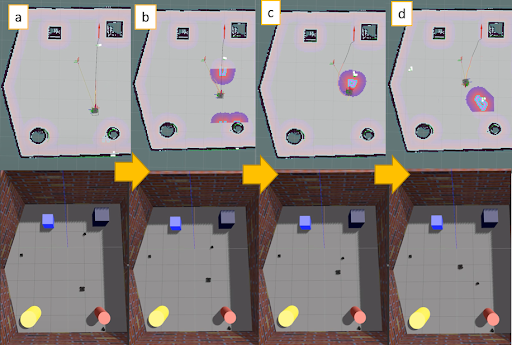
Hi everyone, Based on the ROS tutorial I added a simple layer to the global map as a plugin. the question is, How can I customize the local cost map as I want? I attached a picture and I want to do the same. Based on the image, the shape of a dynamic obstacle is changing during navigation on the local cost map. Image link thank you for your support...

I could not quite grasp the image you provided, could you elaborate?
In any case, it is good to remember that, as the global, the local costmap is still, in fact, a costmap. That being said, the parameters are common to either one of them, making the way you configure them the factor that distinguishes one from the other. I would advice you to take a look into these.
I added the image to the question. I want to do something like a picture...
Still did not get it... You did not provide any additional information that might be useful. What is your end goal? Can you try explain what you are trying to achieve in that image that you provided?
Does the "customize the local cost map as I want" part mean something like a virtual obstacle that the robot sees as it moves? It would be something like in this set of packages for MiR: https://github.com/dfki-ric/mir_robot... - concretely: