
what is q_home_offset in ur5 urdf
I'm not able to understand q_home_offset that appears in ur5 urdf file
<!-- Kinematic model -->
<!-- Properties from urcontrol.conf -->
<!--
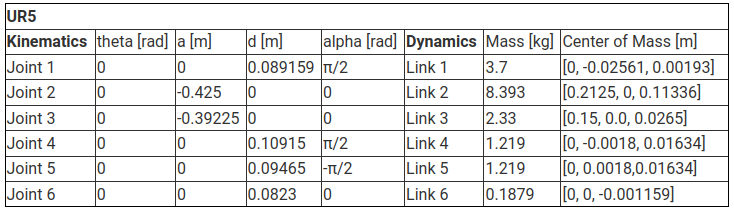
DH for UR5:
a = [0.00000, -0.42500, -0.39225, 0.00000, 0.00000, 0.0000]
d = [0.089159, 0.00000, 0.00000, 0.10915, 0.09465, 0.0823]
alpha = [ 1.570796327, 0, 0, 1.570796327, -1.570796327, 0 ]
q_home_offset = [0, -1.570796327, 0, -1.570796327, 0, 0]
joint_direction = [-1, -1, 1, 1, 1, 1]
mass = [3.7000, 8.3930, 2.2750, 1.2190, 1.2190, 0.1879]
center_of_mass = [ [0, -0.02561, 0.00193], [0.2125, 0, 0.11336], [0.11993, 0.0, 0.0265], [0, -0.0018, 0.01634], [0, 0.0018,0.01634], [0, 0, -0.001159] ]
-->
The actual ur5 dh parameters in the company's website, all angles are of zero offset. Why they appear different?
add a comment

